Características del microprocesador 8086 :
- Contiene un bus de direcciones de 20 bits.
- Contiene un bus de datos de 16 bits, por lo que el 8086 se denomina microprocesador de 16 bits.
- Es un procesador canalizado de 2 etapas. Puede obtener previamente 6 bytes de la memoria y almacenarlos en la cola para aumentar la velocidad de ejecución.
- Su bus de control transporta señales para ejecutar operaciones como lectura, escritura, etc.
- Tiene Bancos de Memoria. 2 bancos de 512KB cada uno. Estos bancos se denominan Banco inferior (par) y Banco superior (impar).
- En 8086, toda la memoria se divide en cuatro segmentos de memoria que son código, pila, datos y segmento adicional.
- 8086 tiene una dirección de E/S de 16 bits.
- Tiene 256 interrupciones.
8086 tiene dos modos de funcionamiento:
- Modo mínimo
- Modo máximo
Modo mínimo :
- En este 8086 es el único procesador del sistema. En un sistema de modo mínimo 8086.
- 8086 funciona en modo mínimo cuando el pin MN/MX está en 1 lógico.
- En este modo, todas las señales de control son emitidas por el propio 8086.
Modo máximo :
- En este podemos conectar más procesadores al 8086 (8087/8089).
- El modo 8086 max es básicamente para implementar la asignación de recursos globales y pasar el control del bus a otro coprocesador (es decir, un segundo procesador en el sistema), porque dos procesadores no pueden acceder al bus del sistema en el mismo instante.
- Todos los procesadores ejecutan su propio programa.
- Los recursos que son comunes a todos los procesadores se conocen como recursos globales.
- Los recursos que se asignan a un procesador en particular se conocen como recursos locales o privados.

Circuito de modo máximo
Explicación del circuito:
- Cuando MN/ MX’ = 0, 8086 funciona en modo máximo.
- El reloj lo proporciona el generador de reloj 8284.
- Controlador de bus 8288 : la dirección del bus de direcciones está bloqueada en el bloqueo de 8 bits 8282. Se requieren tres pestillos de este tipo porque el bus de direcciones es de 20 bits . El ALE (habilitación del pestillo de dirección) está conectado al STB (estroboscópico) del pestillo. El ALE para latch lo proporciona el controlador de bus 8288.
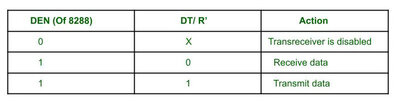
- El bus de datos se opera a través del transceptor 8286 de 8 bits. Se requieren dos transceptores de este tipo, porque el bus de datos es de 16 bits . Los transceptores están habilitados con la señal DEN, mientras que la dirección de los datos está controlada por la señal DT/R. DEN está conectado a OE’ y DT/ R’ está conectado a T. Tanto DEN como DT/ R’ son proporcionados por el controlador de bus 8288.
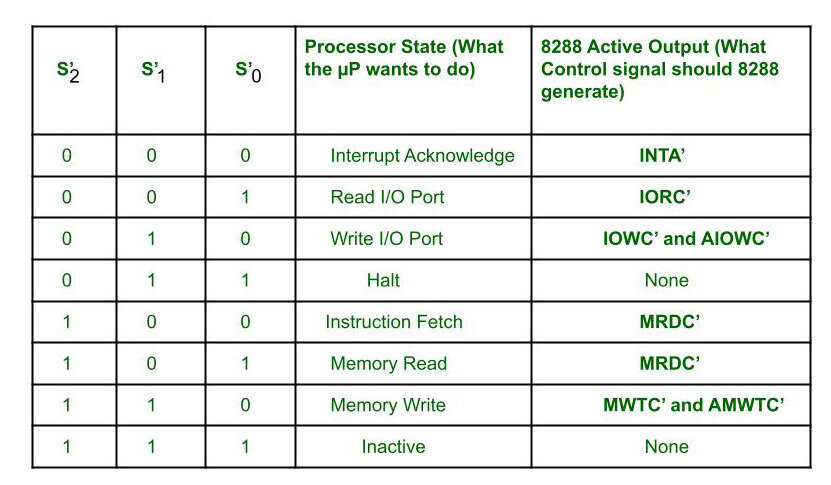
- Las señales de control para todas las operaciones se generan mediante la decodificación de S’ , S’ y S’ utilizando el controlador de bus 8288.
- La solicitud de bus se realiza mediante líneas RQ’ / GT’ interconectadas con 8086. RQ 0 /GT 0 tiene más prioridad que RQ 1 /GT 1 .
- INTA’ es dado por 8288, en respuesta a una interrupción en la línea INTR de 8086.
- En el modo máximo, las señales de escritura avanzadas se habilitan un estado T por adelantado en comparación con las señales de escritura normales. Esto le da a los dispositivos más lentos más tiempo para prepararse para aceptar los datos, por lo tanto, reduce la cantidad de ciclos.
Ventajas del modo máximo de 8086:
- Ayuda a interconectar más dispositivos como 8087. Esta interfaz también se denomina configuración de coprocesador estrechamente acoplado . En este 8086 se llama host y 8087 como coprocesador.
- Admite multiprocesamiento, por lo que ayuda a aumentar la eficiencia.
- El 8087 fue el primer coprocesador de punto flotante para la serie de microprocesadores 8086. El propósito del 8087 era aumentar los cálculos para operaciones de coma flotante, como sumar, sub, multiplicar, dividir y raíz cuadrada.
Desventajas del modo máximo sobre el modo mínimo:
- Tiene un circuito más complejo que el modo min.
Aplicaciones de 8086:
- Las microcomputadoras se construyen usando 8086. Por ejemplo : IBM PC, usó el Intel 8088, una versión del 8086 con bus de datos de 8 bits.
- Se utiliza en calculadoras.
- Se utiliza con fines de control como en las señales de tráfico (utiliza microcontroladores que no son más que contienen una o más CPU junto con memoria y periféricos de E/S programables ).
Publicación traducida automáticamente
Artículo escrito por goutamnagpal y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA