1. Autómatas finitos : El autómata finito o máquina de estados finitos es una máquina abstracta que consta de cinco elementos o tuplas. Tiene un conjunto de estados y reglas para pasar de un estado a otro, pero depende del símbolo de entrada aplicado. Básicamente, es un modelo abstracto de una computadora digital. La siguiente figura muestra algunas características esenciales de la automatización general.
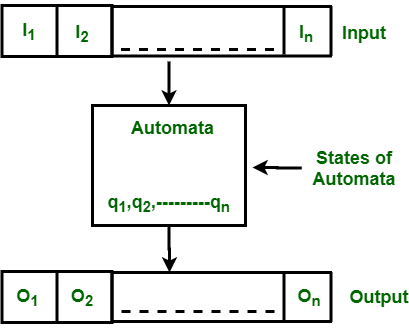
Figura : Características de los autómatas finitos
La figura anterior muestra las siguientes características de los autómatas:
- Aporte
- Producción
- Estados de autómatas
- relación de estado
- Relación de salida
2. Máquina de Turing : es un modelo poderoso que fue propuesto por Alan Turing en 1936. Los modelos anteriores, como los autómatas finitos y los autómatas de empuje hacia abajo, no se consideran modelos precisos porque no pueden reconocer el lenguaje simple. Pero la máquina de Turing es el modelo más preciso para computadoras personales. Una máquina de Turing es capaz de resolver todos los problemas que puede resolver una computadora real. También hay algunos problemas que no pueden resolverse con máquinas de Turing porque estos problemas están más allá de los límites teóricos de la computación.
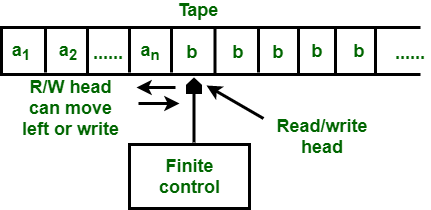
Figura: Modelo de máquina de Turing
Diferencia entre autómatas finitos y máquina de Turing:
| Autómatas finitos | Máquina de Turing |
|---|---|
| Reconoce el lenguaje llamado lenguaje regular. | Reconocerá no solo el lenguaje regular, sino también el lenguaje libre de contexto, el lenguaje sensible al contexto y los lenguajes recursivamente enumerables. |
| En esto, la cinta de entrada tiene una longitud finita tanto en el lado izquierdo como en el derecho. | En esto, la cinta de entrada tiene una longitud finita desde la izquierda pero tiene una longitud infinita desde la derecha. |
| Consiste en un número finito de estados, un conjunto finito de símbolos de entrada, un estado inicial de autómatas y un conjunto finito de reglas de transición para pasar de un estado a otro. | También contiene un conjunto finito de símbolos de cinta y un símbolo en blanco en la cinta, además de un número finito de estados, un conjunto finito de símbolos de entrada, un estado inicial de autómatas y un conjunto finito de reglas de transición para pasar de un estado. a otro. |
| En esta cabeza es capaz de moverse en la dirección correcta solamente. En los autómatas bidireccionales, la cabeza puede moverse en ambas direcciones. | En esto, la cabeza puede moverse en ambas direcciones. |
| El jefe solo puede leer los símbolos de la cinta, pero no puede escribir símbolos en la cinta. | El director puede leer y escribir símbolos en la cinta. |
| Es débil en comparación con la máquina de Turing. | Es más poderoso que Finite Automata. |
| Diseñar autómatas finitos es más fácil. | Diseñar una máquina de Turing es difícil y a la vez complejo. |
| La función de transición en autómatas finitos se puede representar por: δ : Q × Σ* → Q | La función de transición en la máquina de Turing se puede representar mediante: δ : Q × T → Q × T × {L, R} donde L y R especifican el movimiento hacia la izquierda y hacia la derecha del cabezal de la cinta. |
| Las máquinas de estados finitos tienen menor potencia computacional que la máquina de Turing. | Las máquinas de Turing tienen más poder computacional que FSM. |
Publicación traducida automáticamente
Artículo escrito por itskawal2000 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA