Para que un robot visualice el entorno, además de la detección de objetos, también es muy importante la detección de su color en tiempo real.
¿Por qué esto es importante? : Algunas aplicaciones del mundo real
- En coche autónomo, para detectar las señales de tráfico.
- La detección de múltiples colores se utiliza en algunos robots industriales para realizar tareas de recoger y colocar al separar objetos de diferentes colores.
Esta es una implementación de detección de múltiples colores (aquí, solo se han considerado los colores rojo , verde y azul ) en tiempo real usando el lenguaje de programación Python.
Bibliotecas de Python utilizadas:
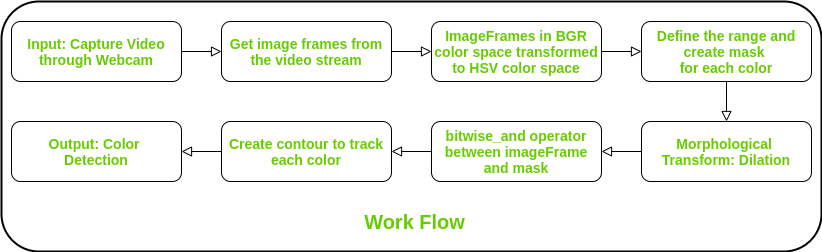
Descripción del flujo de trabajo:
- Paso 1: Entrada: Capture video a través de la cámara web.
Paso 2: Lea la transmisión de video en cuadros de imagen.
Paso 3: Convierta el marco de imagen en BGR (espacio de color RGB representado como tres arrays de rojo, verde y azul con valores enteros de 0 a 255) a espacio de color HSV (valor de saturación de tono). El tono describe un color en términos de saturación , representa la cantidad de color gris en ese color y el valor describe el brillo o la intensidad del color. Esto se puede representar como tres arrays en el rango de 0-179, 0-255 y 0-255 respectivamente.
Paso 4: Define la gama de cada color y crea la máscara correspondiente.
Paso 5:Transformación Morfológica: Dilatación, para eliminar ruidos de las imágenes.
Paso 6: bitwise_and entre el marco de la imagen y la máscara se realiza para detectar específicamente ese color en particular y descartar otros.
Paso 7: cree un contorno para los colores individuales para mostrar claramente la región coloreada detectada.
Paso 8: Salida: Detección de los colores en tiempo real.
A continuación se muestra la implementación.
# Python code for Multiple Color Detection
import numpy as np
import cv2
# Capturing video through webcam
webcam = cv2.VideoCapture(0)
# Start a while loop
while(1):
# Reading the video from the
# webcam in image frames
_, imageFrame = webcam.read()
# Convert the imageFrame in
# BGR(RGB color space) to
# HSV(hue-saturation-value)
# color space
hsvFrame = cv2.cvtColor(imageFrame, cv2.COLOR_BGR2HSV)
# Set range for red color and
# define mask
red_lower = np.array([136, 87, 111], np.uint8)
red_upper = np.array([180, 255, 255], np.uint8)
red_mask = cv2.inRange(hsvFrame, red_lower, red_upper)
# Set range for green color and
# define mask
green_lower = np.array([25, 52, 72], np.uint8)
green_upper = np.array([102, 255, 255], np.uint8)
green_mask = cv2.inRange(hsvFrame, green_lower, green_upper)
# Set range for blue color and
# define mask
blue_lower = np.array([94, 80, 2], np.uint8)
blue_upper = np.array([120, 255, 255], np.uint8)
blue_mask = cv2.inRange(hsvFrame, blue_lower, blue_upper)
# Morphological Transform, Dilation
# for each color and bitwise_and operator
# between imageFrame and mask determines
# to detect only that particular color
kernal = np.ones((5, 5), "uint8")
# For red color
red_mask = cv2.dilate(red_mask, kernal)
res_red = cv2.bitwise_and(imageFrame, imageFrame,
mask = red_mask)
# For green color
green_mask = cv2.dilate(green_mask, kernal)
res_green = cv2.bitwise_and(imageFrame, imageFrame,
mask = green_mask)
# For blue color
blue_mask = cv2.dilate(blue_mask, kernal)
res_blue = cv2.bitwise_and(imageFrame, imageFrame,
mask = blue_mask)
# Creating contour to track red color
contours, hierarchy = cv2.findContours(red_mask,
cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE)
for pic, contour in enumerate(contours):
area = cv2.contourArea(contour)
if(area > 300):
x, y, w, h = cv2.boundingRect(contour)
imageFrame = cv2.rectangle(imageFrame, (x, y),
(x + w, y + h),
(0, 0, 255), 2)
cv2.putText(imageFrame, "Red Colour", (x, y),
cv2.FONT_HERSHEY_SIMPLEX, 1.0,
(0, 0, 255))
# Creating contour to track green color
contours, hierarchy = cv2.findContours(green_mask,
cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE)
for pic, contour in enumerate(contours):
area = cv2.contourArea(contour)
if(area > 300):
x, y, w, h = cv2.boundingRect(contour)
imageFrame = cv2.rectangle(imageFrame, (x, y),
(x + w, y + h),
(0, 255, 0), 2)
cv2.putText(imageFrame, "Green Colour", (x, y),
cv2.FONT_HERSHEY_SIMPLEX,
1.0, (0, 255, 0))
# Creating contour to track blue color
contours, hierarchy = cv2.findContours(blue_mask,
cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE)
for pic, contour in enumerate(contours):
area = cv2.contourArea(contour)
if(area > 300):
x, y, w, h = cv2.boundingRect(contour)
imageFrame = cv2.rectangle(imageFrame, (x, y),
(x + w, y + h),
(255, 0, 0), 2)
cv2.putText(imageFrame, "Blue Colour", (x, y),
cv2.FONT_HERSHEY_SIMPLEX,
1.0, (255, 0, 0))
# Program Termination
cv2.imshow("Multiple Color Detection in Real-TIme", imageFrame)
if cv2.waitKey(10) & 0xFF == ord('q'):
cap.release()
cv2.destroyAllWindows()
break
Producción:
Publicación traducida automáticamente
Artículo escrito por goodday451999 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA