Transformación 3D: En términos muy generales, un modelo 3D es una representación matemática de una entidad física que ocupa espacio. En términos más prácticos, un modelo 3D se compone de una descripción de su forma y una descripción de su apariencia de color. La transformación 3D es el proceso de manipular la vista de un objeto tridimensional con respecto a su posición original modificando su atributos físicos a través de varios métodos de transformación como traducción, escala, rotación, corte, etc.
Propiedades de la Transformación 3-D:
- Las líneas se conservan,
- Se conserva el paralelismo,
- Se conservan las distancias proporcionales.
Se puede hacer una categorización principal de la representación de un objeto 3D considerando si se representa la superficie o el volumen del objeto:
Basado en límites: se representa la superficie del objeto 3D. Esta representación también se llama b-rep. Las mallas poligonales, las superficies implícitas y las superficies paramétricas, que describiremos a continuación, son representaciones comunes de este tipo.
Basado en volumen: se representa el volumen del objeto 3D. Los vóxeles y la geometría sólida constructiva (CSG) se utilizan comúnmente para representar datos volumétricos.
Tipos de Transformaciones:
- Traducción
- Escalada
- Rotación
- Cortar
- Reflexión
Traducción: Es el proceso de cambiar la ubicación relativa de un objeto tridimensional con respecto a la posición original cambiando sus coordenadas. La array de transformación de traslación en la imagen 3-D se muestra como – ![\\ \newline\hspace{4.48cm} \Large \mathbf{ T[x, y, z]= \left [ \begin{matrix} 1 &0&0& 0\\ 0 & 1&0&0&\\ 0 & 0&1&0\\ D_x&D_y&D_z&1\\ \end{matrix}\right]} \newline \hspace{3.08cm}\\\\](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-24899c8f49901b0529b575d84a71c11b_l3.png "Rendered by QuickLaTeX.com") Donde D x , D y , D z son las distancias de traslación, dejemos que un punto en el espacio 3D sea P(x, y, z) sobre el cual queremos aplicar la transformación de traslación y tenemos la distancia de traslación [D x , D y , D z ] Entonces, la nueva posición del punto después de aplicar la operación de traslación sería:
Donde D x , D y , D z son las distancias de traslación, dejemos que un punto en el espacio 3D sea P(x, y, z) sobre el cual queremos aplicar la transformación de traslación y tenemos la distancia de traslación [D x , D y , D z ] Entonces, la nueva posición del punto después de aplicar la operación de traslación sería: ![\, \hspace{4.5cm} \textbf{P'[x', y', z', 1] = P[x, y, z, 1].T[x, y, z]}](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-5241b21a5a1add7265a2cb169dab4b96_l3.png "Rendered by QuickLaTeX.com")
Problema: Realice la transformación de traslación en la siguiente figura donde las distancias de traslación dadas son D x = 2, D y = 4, D z = 6.
Solución: al aplicar la transformación de traducción obtenemos los puntos correspondientes:
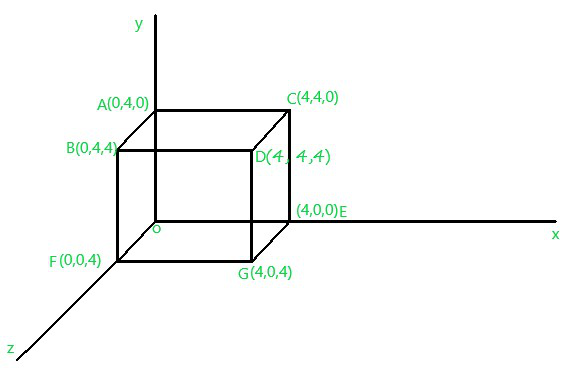
Figura 1
![\large \mathbf{ O'[x, y, z, 1]= [0\, 0\, 0\, 1]\left [ \begin{matrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&1&0\\ 2&4&6&1\\ \end{matrix}\right]=[2\, 4\, 6\, 1]}\\\\ \hspace{4cm}\mathbf{A'[x, y, z, 1]= [0\, 4\, 0\, 1]\left [ \begin{matrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&1&0\\ 2&4&6&1\\ \end{matrix}\right]=[2\, 8\, 6\, 1]}\\\\ \hspace{4cm} \mathbf{B'[x, y, z, 1]= [0\, 4\, 4\, 1]\left [ \begin{matrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&1&0\\ 2&4&6&1\\ \end{matrix}\right]=[2\, 8\, 10\, 1]}\\\\ \hspace{4cm} \mathbf{C'[x, y, z, 1]= [4\, 4\, 0\, 1]\left [ \begin{matrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&1&0\\ 2&4&6&1\\ \end{matrix}\right]=[6\, 8\, 6\, 1]}\\\\ \hspace{4cm} \mathbf{D'[x, y, z, 1]= [4\, 4\, 4\, 1]\left [ \begin{matrix} 1 & 0 & 0 & 0\\ 0 & 1 & 0 & 0\\ 0 & 0 & 1 & 0\\ 2 & 4 & 6 & 1\\ \end{matrix}\right]=[6\, 8\, 10\, 1]}\\\\ \hspace{4cm} \mathbf{E'[x, y, z, 1]= [4\, 0\, 0\, 1]\left [ \begin{matrix} 1 & 0 & 0 & 0\\ 0 & 1 & 0 & 0\\ 0 & 0 & 1 & 0\\ 2 & 4 & 6 & 1\\ \end{matrix}\right]=[6\, 4\, 6\, 1]}\\\\ \hspace{4cm}\mathbf{ F'[x, y, z, 1]= [0\, 0\, 4\, 1]\left [ \begin{matrix} 1 & 0 & 0 & 0\\ 0 & 1 & 0 & 0\\ 0 & 0 & 1 & 0\\ 2 & 4 & 6 & 1\\ \end{matrix}\right]=[2\, 4\, 10\, 1]}\\\\ \hspace{4cm} \mathbf{G'[x, y, z, 1]= [4\, 0\, 4\, 1]\left [ \begin{matrix} 1 & 0 & 0 & 0\\ 0 & 1 & 0 & 0\\ 0 & 0 & 1 & 0\\ 2 & 4 & 6 & 1\\ \end{matrix}\right]=[6\, 4\, 10\, 1]}\\\\](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-9753068856ed95076cb8544c39f7c1fa_l3.png "Rendered by QuickLaTeX.com") Después de realizar la transformación de traducción sobre la Fig.1 , se verá como se muestra a continuación:
Después de realizar la transformación de traducción sobre la Fig.1 , se verá como se muestra a continuación:
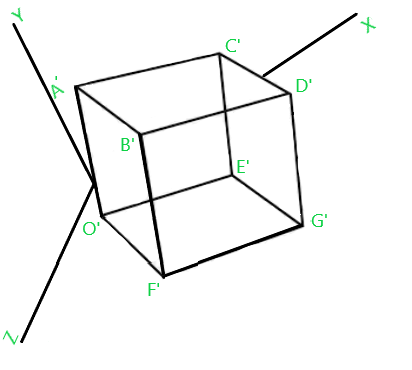
Figura 2
Publicación traducida automáticamente
Artículo escrito por madhav_mohan y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA