Título del proyecto: CamCaliber
Introducción:
La calibración de la cámara es una tarea importante en las aplicaciones de visión artificial. En un sistema de videovigilancia con una sola cámara estática, los resultados del seguimiento de objetos en movimiento se pueden utilizar de manera efectiva para la calibración de la cámara. Aunque la calibración de cámaras a partir del seguimiento de objetos se ha estudiado durante años, todavía enfrenta muchos desafíos. El rendimiento de la calibración de la leva depende en gran medida de la precisión de las ubicaciones extraídas de la cabeza y el pie, lo que está relacionado con la solidez del enfoque de segmentación y seguimiento. Por lo tanto, hemos intentado utilizar un sistema robusto de segmentación y seguimiento de objetos para lograr una localización precisa de cabeza/pie. Se extraen en función del resultado del seguimiento y la mancha de primer plano segmentada de cada objeto.
Marco conceptual:
Proponemos un método para diseñar un sistema de tal manera que pueda optimizar los resultados de seguimiento utilizando técnicas de aprendizaje profundo, es decir, una red neuronal convolucional (CNN), que es un método rápido de detección de objetos.
Para lograr nuestro proyecto, utilizamos una secuencia de imágenes positivas e imágenes negativas de un objeto para ser detectado y encontrar el resultado de manera eficiente. Implementamos esto usando la biblioteca TensorFlow en lenguaje Python. Este sistema se puede implementar utilizando sensores para trabajar en el seguimiento de objetos de forma remota, por ejemplo, automóviles autónomos, además, captura de ladrones, asistencia al conductor, etc. Con esto, se hace de manera eficiente y se muestra en las instantáneas a continuación.
Objetivo:
El objetivo es diseñar un sistema robusto y eficiente para resolver problemas de seguimiento de objetos en el campo de la videovigilancia, así como el análisis de video en tiempo real.
Problemas actuales:
los estudios recientes muestran que en la videovigilancia existen problemas desafiantes para el seguimiento de objetos, como la rotación de la cámara, la localización falsa, etc. el soporte de la cámara no podría rastrear cuando se golpea con fuerza. Por lo tanto, la cámara está hecha de tal manera que se capturará a sí misma y mostrará el resultado bola por bola. El costo en tiempo real será menor y eficiente.
Instantáneas: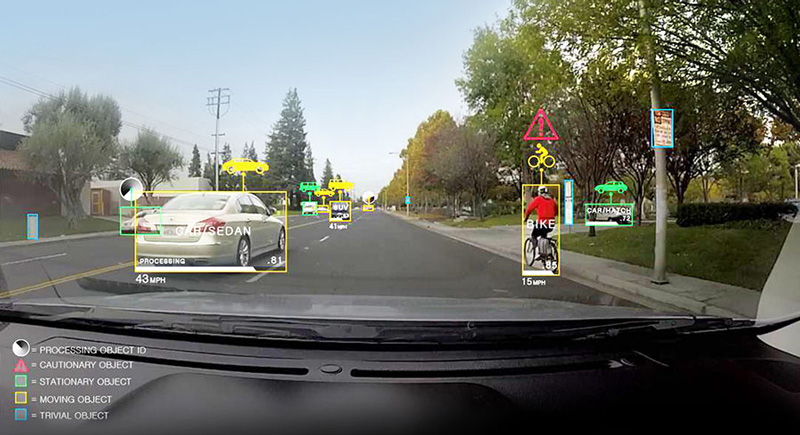

Herramientas utilizadas:
- Sensores (envía datos de forma privada al almacenamiento en la nube)
- Cámara de la sede
- Python 3.4+
- OpenCV (Biblioteca de visión artificial de código abierto)
Para esto, hemos utilizado técnicas de aprendizaje profundo para modelar esto utilizando CNN (Red neuronal convolucional) con la biblioteca TensorFlow.
Mejoras futuras:
en el futuro, aunque podemos implementar en muchas aplicaciones de videovigilancia, también se puede implementar en varias plataformas de detección y seguimiento de objetos como carreras de autos, carreras de motos, partidos en vivo como Cricket, fútbol para ayudar a los jugadores, espectadores durante los partidos.
Además, también podemos implementar esto en cualquier lugar para rastrear cualquier tipo de objetos y usando sensores, podemos obtener información de forma privada desde la nube y hacer el resultado de forma remota.
Enlace del repositorio de código de GitHub: https://github.com/shaanhk/CamCaliber
Miembros del equipo:
- Afzal Ansari
- saan
Nota: esta idea de proyecto se contribuye para ProGeek Cup 2.0: una competencia de proyectos de GeeksforGeeks.
Publicación traducida automáticamente
Artículo escrito por AFZAL ANSARI y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA