Requisitos previos: unidad de control cableada
Aquí las señales de control se generan mediante hardware. Hay tres tipos de unidades de control cableadas. 1 . Método de la tabla de estados:
Método de la tabla de estados
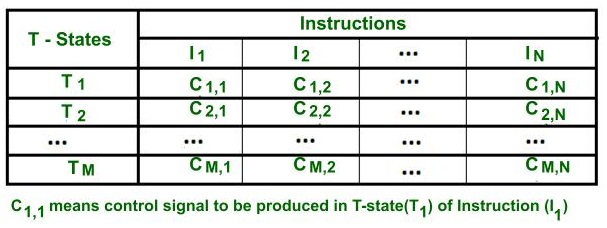
- Aquí, el comportamiento de la unidad de control se representa en forma de tabla, que se conoce como tabla de estado .
- Aquí, cada fila representa los estados T y las columnas representan las instrucciones.
- Cada intersección de la columna específica con cada fila indica qué señal de control se producirá en el estado T correspondiente de una instrucción.
- Aquí, el circuito de hardware está diseñado para cada columna (es decir, para una instrucción específica) para producir señales de control en diferentes estados T.
Ventaja –
- Es el método más simple.
- Este método se utiliza principalmente para procesadores de conjuntos de instrucciones pequeños (es decir, en procesadores RISC).
Retirarse –
- En los procesadores modernos, hay una gran cantidad de conjuntos de instrucciones. Por lo tanto, el circuito se vuelve complicado de diseñar, difícil de depurar, y si hacemos alguna modificación en la tabla de estado, entonces es necesario cambiar la mayor parte del circuito.
- Por lo tanto, esto no se usa mucho para este tipo de procesadores.
- Hay muchas redundancias en el diseño de circuitos, como que las señales de control que se requieren para obtener la instrucción son comunes y se repiten para N número de instrucciones. Por lo tanto, el costo del diseño de circuitos puede aumentar.
2. Método del elemento de retardo:
- Aquí el comportamiento de la unidad de control se representa en forma de diagrama de flujo .
- Cada paso en el diagrama de flujo representa una señal de control que debe producirse para procesar las instrucciones.
- Si se realizan todos los pasos de las instrucciones, esto significa que la instrucción se ejecuta por completo.
- Las señales de control realizan microoperaciones y cada microoperación requiere un estado T.
- Para las microoperaciones que son independientes, se requiere que se realicen en diferentes estados T. Por lo tanto, para cada señal de control consecutiva se requiere exactamente un retardo de 1 estado, que puede generarse con la ayuda de D FF.
- Por lo tanto. Los Flip-Flops D se insertan entre cada dos señales de control consecutivas.
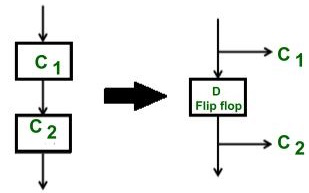
- Como podemos observar, el D FF se introduce entre cada par de señales de control. Por lo tanto, después de que se genera una señal de control, el elemento de retardo antes de esa señal de control no se usa hasta antes de que la siguiente instrucción requiera esa señal de control. Por lo tanto, de todos los D Flip-Flops, solo uno estará activo a la vez. Por lo tanto, este método también se conoce como un método caliente .
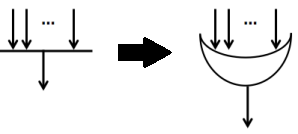
- En un diagrama de flujo, si hay un punto de entrada múltiple para la señal de control, para combinar dos o más rutas, usamos una puerta OR.
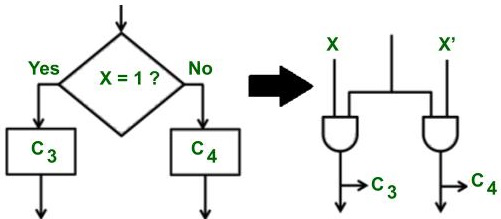
- Un cuadro de decisión se convierte en un conjunto de dos puertas AND complementarias.
Ejemplo:
suponga que el procesador tiene dos instrucciones para sumar o restar (por lo tanto, se necesita un código de operación de 1 bit en el que se usa 0 código de operación para la instrucción de suma y 1 para la resta).
Método del elemento de retardo para generar señales de control.
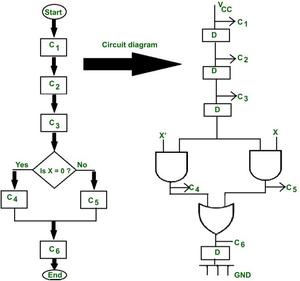
Diseño de diagrama de flujo:
SayC 1 , C 2 , C 3 son las señales de control para obtener la instrucción. Cuando X = 0, entonces se produce la señal de control C 4 (es decir, la decodificación) que se utiliza para realizar la operación de suma, y cuando x = 1, se produce la señal de control C 5 para realizar la operación de resta. Y la señal de control c 6 se usa para almacenar el resultado y el proceso finaliza.
Diseño del circuito :
entre dos señales de control consecutivas que son independientes, se introduce un elemento de retardo entre ellas para producir un estado de retardo de 1 T. El cuadro de decisión se convierte en un circuito de compuerta AND complementado (es decir, si x = 0, entonces x’ = 1, por lo que se genera una señal de control ac 4 ).
Ventaja –
- Este método tiene un enfoque lógico, por lo que ayuda a reducir la complejidad del circuito.
- Para las señales de control comunes que deben generarse en cada instrucción, para ellas solo se puede diseñar un circuito.
Retirarse –
- A medida que aumenta el número de instrucciones, aumenta el número de D FF para generar retardo, por lo que aumenta la complejidad y el costo general del circuito.
3. Método de contador de secuencia:
Método de contador de secuencia
- Este es el método más popular y más utilizado para generar retrasos entre cada señal de control consecutiva.
Su principal ventaja es que utiliza el enfoque lógico del diagrama de flujo y no utiliza el número innecesario de D FF. - Primero, se diseña un diagrama de flujo para representar el comportamiento de una unidad de control.
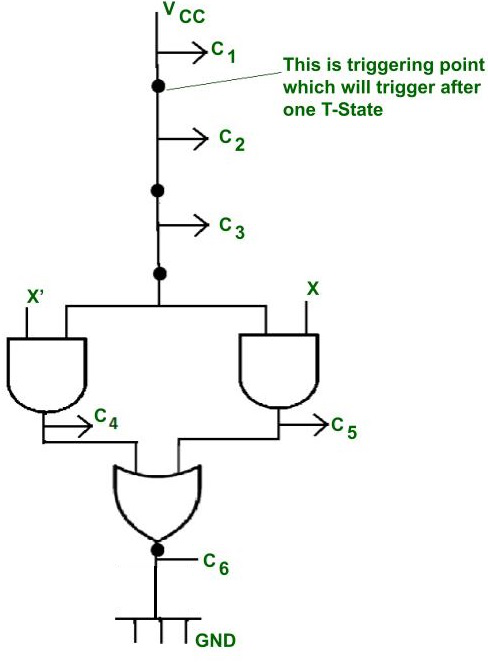
- Luego se convierte en un circuito usando el mismo método de las puertas AND & OR (como se ve arriba en el método del elemento Delay).
Ejemplo de 2 instrucciones utilizadas en el método del elemento de retardo
Ejemplo de 2 instrucciones utilizadas en el método del elemento de retardo [/caption]
- Es similar al método del elemento de retardo, pero la única diferencia es que en lugar de chanclas D innecesarias, hay puntos de activación en el circuito. Se activan después de un intervalo de estado T uno a uno.
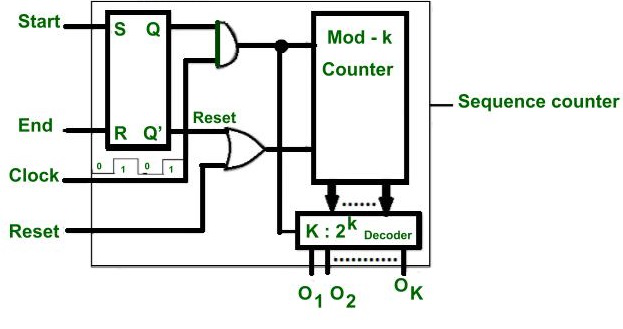
Funcionamiento del circuito contador de secuencia –
- Aquí se utiliza un SR FF, una decodificación y un contador.
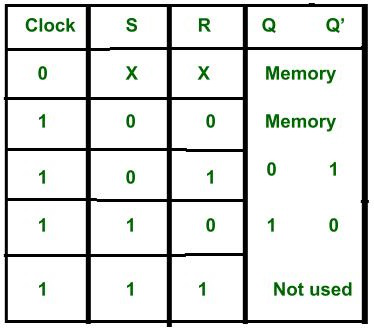
Tabla de verdad de SR FF
- Cuando comienza el ciclo de instrucción, entonces start = 1 .
- Como sabemos, cuando Start = 1, debido a que S está conectado a Start, Q se convierte en 1 y Q’ se convierte en 0.
- Aquí se utiliza el reloj de disparo de nivel . Por lo tanto, cuando el reloj = 1 o alto y Start = 1, ya que ambas salidas están conectadas a la compuerta AND, si la resultante de ambas es 1, se habilitará el contador y el contador comenzará a contar desde el estado 0 0 0. Entonces, el estado 0 0 0 es decodificado por un decodificador y produce la salida O 1 , que activará el punto de activación en el circuito de control.
- A medida que el reloj vuelve a estar alto después de 1 estado T. Por lo tanto, cuando el reloj = 0, el estado del contador se conserva (Q y Q ‘) permanece igual hasta que el reloj vuelve a estar alto. Esto asegura que el contador cambie sus estados después de un intervalo de estado T uno a uno.
- Supongamos que el contador es de 3 bits, genera 2 3 = 8 estados (000 001 ….. 111) . El primer conteo 0 0 0 se le da al decodificador 3:8. Activará la salida número 1. Esta salida no es una señal de control, pero activará el punto de activación en el circuito de la unidad de control.
- A medida que el reloj vuelve a ser alto después de un intervalo de un estado T, por lo tanto, el reloj = 1 y el inicio = 1, entonces el contador se habilita y cambia su estado a 001 y el contador decodifica el conteo y hace que la salida de O 2 sea alta . Y esto activará un segundo punto de activación en el circuito.
- Todos los estados de conteo se decodifican de la misma manera.
Si el contador es de K bits, entonces se requiere un decodificador K:2 K , esto puede producir salidas de 2K y eso activará los puntos de activación de 2K después de una brecha de 1-1 estados T en el circuito.
- Cuando finaliza la instrucción, se genera la señal de control para hacer que el pin End = 1, y el contador se restablece, por lo que la próxima vez, comienza desde el primer conteo (0 0 0).
- Si el pin de reinicio = 1, entonces el contador se reiniciará y luego comenzará a contar nuevamente desde 000 estados.
ventajas :
- Se utiliza menos número de flip-flops.
Desventajas de la unidad de control cableada:
- En los procesadores modernos, hay una gran cantidad de conjuntos de instrucciones. Por lo tanto, el circuito se vuelve complicado de diseñar, difícil de depurar, y si hacemos alguna modificación, una gran parte del circuito debe cambiarse. Por lo tanto, es adecuado para procesadores RISC.
Publicación traducida automáticamente
Artículo escrito por goutamnagpal y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA