Dado un árbol N-ario con N vértices enraizados en 1 y un conjunto de vértices como V[] , la tarea es imprimir cualquier vértice U tal que el camino desde la raíz hasta U consista en todos los vértices desde V[] como máximo distancia 1 . Si no se obtiene ningún vértice, imprima “No” . De lo contrario, imprima el valor de U .
Ejemplos:
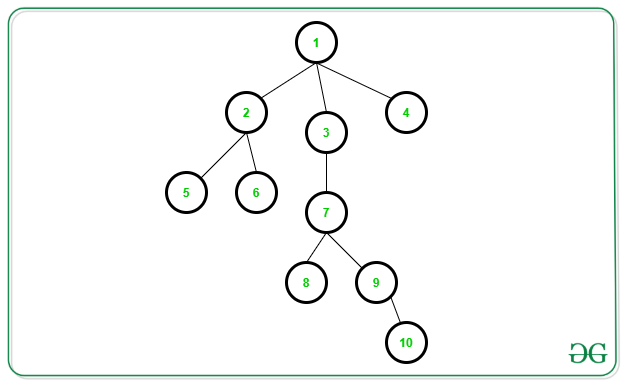
Entrada: N = 10, Bordes[][] = {{1, 2}, {1, 3}, {1, 4}, {2, 5}, {2, 6}, {3, 7}, { 7, 8}, {7, 9}, {9, 10}}, V[] = {4, 3, 8, 9, 10}
Salida: 10
Explicación: La ruta desde la raíz hasta el Node 10 contiene {1, 3, 7, 9, 10} y 8 está a la distancia 1 de esta ruta.Entrada: N = 10, Bordes[][] = {{1, 2}, {1, 3}, {1, 4}, {2, 5}, {2, 6}, {3, 7}, { 7, 8}, {7, 9}, {9, 10}}, V[] = {3, 4, 2, 8}
Salida: 8
Explicación: La ruta desde la raíz hasta el Node 8 contiene {1, 3, 7, 8}. Ahora, 4 y 2 están a una distancia de 1 de este camino.
Enfoque ingenuo: la idea ingenua es encontrar todos los caminos posibles desde la raíz 1 a cada Node y elegir el que contiene todos los vértices requeridos del conjunto dado V[] en el camino desde la raíz hasta ese vértice elegido o tiene una distancia 1 de ese camino.
Complejidad de Tiempo: O(N!)
Espacio Auxiliar: O(N 2 )
Enfoque eficiente: el enfoque anterior se puede optimizar calculando previamente las distancias de cada vértice desde la raíz . Este cálculo previo ayuda a encontrar si algún vértice P es padre de algún otro vértice C en el árbol dado o no. A continuación se muestran los pasos:
- Realice DFS Traversal desde el Node raíz 1 y almacene el tiempo antes y después de la visita de cada Node en el árbol dado.
- Ahora, el vértice V es el padre del vértice U si y solo si el tiempo previo de V es menor o igual que el tiempo previo de U y el tiempo posterior de U es mayor o igual que el tiempo posterior de V.
- Se puede notar que el camino del vértice más profundo en el conjunto dado V[] desde el vértice raíz es el resultado requerido.
- Ahora, el problema se reduce a verificar si el padre de cada vértice en el conjunto dado V[] es el antepasado del vértice más profundo en el conjunto V[] .
- Por lo tanto, reemplace cada vértice con su padre (excepto la raíz ) y verifique que cada padre sea el antepasado del vértice más profundo según la propiedad mencionada anteriormente.
- Si la condición se cumple, imprima el vértice más profundo; de lo contrario, imprima «No» .
A continuación se muestra la implementación del enfoque anterior:
C++
// C++ program for the above approach
#include <bits/stdc++.h>
using namespace std;
// To store the time
int timeT = 0;
// Function to perform DFS
// to store times, distance
// and parent of each node
void dfs(int u, int p, int dis,
vector<int>& vis,
vector<int>& distance,
vector<int>& parent,
vector<int>& preTime,
vector<int>& postTime,
vector<int> Adj[])
{
// Update the distance of node u
distance[u] = dis;
// Update parent of node u
parent[u] = p;
vis[u] = 1;
// Increment time timeT
timeT++;
// Discovery time of node u
preTime[u] = timeT;
// Traverse the adjacency list
// of current node and recursively
// call DFS for each vertex
for (int i = 0; i < Adj[u].size(); i++) {
// If current node Adj[u][i]
// is unvisited
if (vis[Adj[u][i]] == 0) {
dfs(Adj[u][i], u, dis + 1,
vis, distance, parent,
preTime, postTime, Adj);
}
}
timeT++;
// Update the finishing time
postTime[u] = timeT;
}
// Function to add edges between
// nodes u and v
void addEdge(vector<int> Adj[],
int u, int v)
{
Adj[u].push_back(v);
Adj[v].push_back(u);
}
// Function to find the node U
// such that path from root to U
// contains nodes in V[]
void findNodeU(int N, int V,
int Vertices[],
int Edges[][2])
{
// Initialise vis, dis, parent,
// preTime, and postTime
vector<int> vis(N + 1, 0);
vector<int> distance(N + 1, 0);
vector<int> parent(N + 1, 0);
vector<int> preTime(N + 1, 0);
vector<int> postTime(N + 1, 0);
// Store Adjacency List
vector<int> Adj[N + 1];
int u, v;
// Create adjacency List
for (int i = 0; i < N - 1; i++) {
addEdge(Adj, Edges[i][0],
Edges[i][1]);
}
// Perform DFS Traversal
dfs(1, 0, 0, vis, distance, parent,
preTime, postTime, Adj);
int maximumDistance = 0;
// Stores the distance
// of deepest vertex 'u'
maximumDistance = 0;
// Update the deepest node by
// traversing the qu[]
for (int k = 0; k < V; k++) {
// Find deepest vertex
if (maximumDistance
< distance[Vertices[k]]) {
maximumDistance
= distance[Vertices[k]];
u = Vertices[k];
}
// Replace each vertex with it's
// corresponding parent except
// the root vertex
if (parent[Vertices[k]] != 0) {
Vertices[k]
= parent[Vertices[k]];
}
}
bool ans = true;
bool flag;
for (int k = 0; k < V; k++) {
// Checks if the ancestor
// with respect to deepest
// vertex u
if (preTime[Vertices[k]]
<= preTime[u]
&& postTime[Vertices[k]]
>= postTime[u])
flag = true;
else
flag = false;
// Update ans
ans = ans & flag;
}
// Print the result
if (ans)
cout << u;
else
cout << "NO";
}
// Driver Code
int main()
{
// Total vertices
int N = 10;
int V = 5;
// Given set of vertices
int Vertices[] = { 4, 3, 8, 9, 10 };
// Given edges
int Edges[][2] = { { 1, 2 }, { 1, 3 },
{ 1, 4 }, { 2, 5 },
{ 2, 6 }, { 3, 7 },
{ 7, 8 }, { 7, 9 },
{ 9, 10 } };
// Function Call
findNodeU(N, V, Vertices, Edges);
return 0;
}
Java
// Java program for the above approach
import java.util.*;
class GFG{
// To store the time
static int timeT = 0;
// Function to perform DFS
// to store times, distance
// and parent of each node
static void dfs(int u, int p, int dis, int vis[],
int distance[], int parent[],
int preTime[], int postTime[],
ArrayList<ArrayList<Integer>> Adj)
{
// Update the distance of node u
distance[u] = dis;
// Update parent of node u
parent[u] = p;
vis[u] = 1;
// Increment time timeT
timeT++;
// Discovery time of node u
preTime[u] = timeT;
// Traverse the adjacency list
// of current node and recursively
// call DFS for each vertex
for(int i = 0; i < Adj.get(u).size(); i++)
{
// If current node Adj[u][i]
// is unvisited
if (vis[Adj.get(u).get(i)] == 0)
{
dfs(Adj.get(u).get(i), u, dis + 1,
vis, distance, parent, preTime,
postTime, Adj);
}
}
timeT++;
// Update the finishing time
postTime[u] = timeT;
}
// Function to add edges between
// nodes u and v
static void addEdge(ArrayList<ArrayList<Integer>> Adj,
int u, int v)
{
Adj.get(u).add(v);
Adj.get(v).add(u);
}
// Function to find the node U
// such that path from root to U
// contains nodes in V[]
static void findNodeU(int N, int V,
int Vertices[],
int Edges[][])
{
// Initialise vis, dis, parent,
// preTime, and postTime
int vis[] = new int[N + 1];
int distance[] = new int[N + 1];
int parent[] = new int[N + 1];
int preTime[] = new int[N + 1];
int postTime[] = new int[N + 1];
// Store Adjacency List
ArrayList<
ArrayList<Integer>> Adj = new ArrayList<>();
for(int i = 0; i < N + 1; i++)
Adj.add(new ArrayList<Integer>());
int u = 0, v;
// Create adjacency List
for(int i = 0; i < N - 1; i++)
{
addEdge(Adj, Edges[i][0], Edges[i][1]);
}
// Perform DFS Traversal
dfs(1, 0, 0, vis, distance,
parent, preTime, postTime, Adj);
int maximumDistance = 0;
// Stores the distance
// of deepest vertex 'u'
maximumDistance = 0;
// Update the deepest node by
// traversing the qu[]
for(int k = 0; k < V; k++)
{
// Find deepest vertex
if (maximumDistance <
distance[Vertices[k]])
{
maximumDistance =
distance[Vertices[k]];
u = Vertices[k];
}
// Replace each vertex with it's
// corresponding parent except
// the root vertex
if (parent[Vertices[k]] != 0)
{
Vertices[k] = parent[Vertices[k]];
}
}
boolean ans = true;
boolean flag;
for(int k = 0; k < V; k++)
{
// Checks if the ancestor
// with respect to deepest
// vertex u
if (preTime[Vertices[k]] <= preTime[u] &&
postTime[Vertices[k]] >= postTime[u])
flag = true;
else
flag = false;
// Update ans
ans = ans & flag;
}
// Print the result
if (ans)
System.out.println(u);
else
System.out.println("NO");
}
// Driver Code
public static void main(String[] args)
{
// Total vertices
int N = 10;
int V = 5;
// Given set of vertices
int Vertices[] = { 4, 3, 8, 9, 10 };
// Given edges
int Edges[][] = { { 1, 2 }, { 1, 3 },
{ 1, 4 }, { 2, 5 },
{ 2, 6 }, { 3, 7 },
{ 7, 8 }, { 7, 9 },
{ 9, 10 } };
// Function call
findNodeU(N, V, Vertices, Edges);
}
}
// This code is contributed by jrishabh99
Python3
# Python3 program for the above approach
# To store the time
timeT = 0;
# Function to perform DFS
# to store times, distance
# and parent of each node
def dfs(u, p, dis,
vis,
distance,
parent,
preTime,
postTime,
Adj):
global timeT
# Update the distance of node u
distance[u] = dis;
# Update parent of node u
parent[u] = p;
vis[u] = 1;
# Increment time timeT
timeT += 1
# Discovery time of node u
preTime[u] = timeT;
# Traverse the adjacency list
# of current node and recursively
# call DFS for each vertex
for i in range(len(Adj[u])):
# If current node Adj[u][i]
# is unvisited
if (vis[Adj[u][i]] == 0):
dfs(Adj[u][i], u, dis + 1,
vis, distance, parent,
preTime, postTime, Adj);
timeT += 1
# Update the finishing time
postTime[u] = timeT;
# Function to add edges between
# nodes u and v
def addEdge(Adj,u, v):
Adj[u].append(v);
Adj[v].append(u);
# Function to find the node U
# such that path from root to U
# contains nodes in V[]
def findNodeU(N, V, Vertices, Edges):
# Initialise vis, dis, parent,
# preTime, and postTime
vis = [0 for i in range(N + 1)]
distance = [0 for i in range(N + 1)]
parent = [0 for i in range(N + 1)]
preTime = [0 for i in range(N + 1)]
postTime = [0 for i in range(N + 1)]
# Store Adjacency List
Adj = [[] for i in range(N + 1)]
u = 0
v = 0
# Create adjacency List
for i in range(N - 1):
addEdge(Adj, Edges[i][0],
Edges[i][1]);
# Perform DFS Traversal
dfs(1, 0, 0, vis, distance, parent,
preTime, postTime, Adj);
maximumDistance = 0;
# Stores the distance
# of deepest vertex 'u'
maximumDistance = 0;
# Update the deepest node by
# traversing the qu[]
for k in range(V):
# Find deepest vertex
if (maximumDistance < distance[Vertices[k]]):
maximumDistance= distance[Vertices[k]];
u = Vertices[k];
# Replace each vertex with it's
# corresponding parent except
# the root vertex
if (parent[Vertices[k]] != 0):
Vertices[k]= parent[Vertices[k]];
ans = True;
flag = False
for k in range(V):
# Checks if the ancestor
# with respect to deepest
# vertex u
if (preTime[Vertices[k]] <= preTime[u]
and postTime[Vertices[k]]
>= postTime[u]):
flag = True;
else:
flag = False;
# Update ans
ans = ans & flag;
# Print the result
if (ans):
print(u)
else:
print('No')
# Driver Code
if __name__=='__main__':
# Total vertices
N = 10;
V = 5;
# Given set of vertices
Vertices = [ 4, 3, 8, 9, 10 ];
# Given edges
Edges = [ [ 1, 2 ], [ 1, 3 ],
[ 1, 4 ], [ 2, 5 ],
[ 2, 6 ], [ 3, 7 ],
[ 7, 8 ], [ 7, 9 ],
[ 9, 10 ] ];
# Function Call
findNodeU(N, V, Vertices, Edges);
# This code is contributed by rutvik_56
C#
// C# program for
// the above approach
using System;
using System.Collections.Generic;
class GFG{
// To store the time
static int timeT = 0;
// Function to perform DFS
// to store times, distance
// and parent of each node
static void dfs(int u, int p, int dis, int []vis,
int []distance, int []parent,
int []preTime, int []postTime,
List<List<int>> Adj)
{
// Update the distance of node u
distance[u] = dis;
// Update parent of node u
parent[u] = p;
vis[u] = 1;
// Increment time timeT
timeT++;
// Discovery time of node u
preTime[u] = timeT;
// Traverse the adjacency list
// of current node and recursively
// call DFS for each vertex
for(int i = 0; i < Adj[u].Count; i++)
{
// If current node Adj[u,i]
// is unvisited
if (vis[Adj[u][i]] == 0)
{
dfs(Adj[u][i], u, dis + 1,
vis, distance, parent, preTime,
postTime, Adj);
}
}
timeT++;
// Update the finishing time
postTime[u] = timeT;
}
// Function to add edges between
// nodes u and v
static void addEdge(List<List<int>> Adj,
int u, int v)
{
Adj[u].Add(v);
Adj[v].Add(u);
}
// Function to find the node U
// such that path from root to U
// contains nodes in V[]
static void findNodeU(int N, int V,
int []Vertices,
int [,]Edges)
{
// Initialise vis, dis, parent,
// preTime, and postTime
int []vis = new int[N + 1];
int []distance = new int[N + 1];
int []parent = new int[N + 1];
int []preTime = new int[N + 1];
int []postTime = new int[N + 1];
// Store Adjacency List
List<List<int>> Adj = new List<List<int>>();
for(int i = 0; i < N + 1; i++)
Adj.Add(new List<int>());
int u = 0, v;
// Create adjacency List
for(int i = 0; i < N - 1; i++)
{
addEdge(Adj, Edges[i, 0], Edges[i, 1]);
}
// Perform DFS Traversal
dfs(1, 0, 0, vis, distance,
parent, preTime, postTime, Adj);
int maximumDistance = 0;
// Stores the distance
// of deepest vertex 'u'
maximumDistance = 0;
// Update the deepest node by
// traversing the qu[]
for(int k = 0; k < V; k++)
{
// Find deepest vertex
if (maximumDistance <
distance[Vertices[k]])
{
maximumDistance = distance[Vertices[k]];
u = Vertices[k];
}
// Replace each vertex with it's
// corresponding parent except
// the root vertex
if (parent[Vertices[k]] != 0)
{
Vertices[k] = parent[Vertices[k]];
}
}
bool ans = true;
bool flag;
for(int k = 0; k < V; k++)
{
// Checks if the ancestor
// with respect to deepest
// vertex u
if (preTime[Vertices[k]] <= preTime[u] &&
postTime[Vertices[k]] >= postTime[u])
flag = true;
else
flag = false;
// Update ans
ans = ans & flag;
}
// Print the result
if (ans)
Console.WriteLine(u);
else
Console.WriteLine("NO");
}
// Driver Code
public static void Main(String[] args)
{
// Total vertices
int N = 10;
int V = 5;
// Given set of vertices
int []Vertices = {4, 3, 8, 9, 10};
// Given edges
int [,]Edges = {{1, 2}, {1, 3},
{1, 4}, {2, 5},
{2, 6}, {3, 7},
{7, 8}, {7, 9},
{9, 10}};
// Function call
findNodeU(N, V, Vertices, Edges);
}
}
// This code is contributed by gauravrajput1
Javascript
<script>
// JavaScript implementation of the above approach
// To store the time
let timeT = 0;
// Function to perform DFS
// to store times, distance
// and parent of each node
function dfs(u, p, dis, vis, distance, parent,
preTime, postTime, Adj)
{
// Update the distance of node u
distance[u] = dis;
// Update parent of node u
parent[u] = p;
vis[u] = 1;
// Increment time timeT
timeT++;
// Discovery time of node u
preTime[u] = timeT;
// Traverse the adjacency list
// of current node and recursively
// call DFS for each vertex
for(let i = 0; i < Adj[u].length; i++)
{
// If current node Adj[u,i]
// is unvisited
if (vis[Adj[u][i]] == 0)
{
dfs(Adj[u][i], u, dis + 1,
vis, distance, parent, preTime,
postTime, Adj);
}
}
timeT++;
// Update the finishing time
postTime[u] = timeT;
}
// Function to add edges between
// nodes u and v
function addEdge(Adj, u, v)
{
Adj[u].push(v);
Adj[v].push(u);
}
// Function to find the node U
// such that path from root to U
// contains nodes in V[]
function findNodeU(N, V, Vertices, Edges)
{
// Initialise vis, dis, parent,
// preTime, and postTime
let vis = new Array(N + 1);
vis.fill(0);
let distance = new Array(N + 1);
distance.fill(0);
let parent = new Array(N + 1);
parent.fill(0);
let preTime = new Array(N + 1);
preTime.fill(0);
let postTime = new Array(N + 1);
postTime.fill(0);
// Store Adjacency List
let Adj = [];
for(let i = 0; i < N + 1; i++)
Adj.push([]);
let u = 0, v;
// Create adjacency List
for(let i = 0; i < N - 1; i++)
{
addEdge(Adj, Edges[i][0], Edges[i][1]);
}
// Perform DFS Traversal
dfs(1, 0, 0, vis, distance,
parent, preTime, postTime, Adj);
let maximumDistance = 0;
// Stores the distance
// of deepest vertex 'u'
maximumDistance = 0;
// Update the deepest node by
// traversing the qu[]
for(let k = 0; k < V; k++)
{
// Find deepest vertex
if (maximumDistance < distance[Vertices[k]])
{
maximumDistance = distance[Vertices[k]];
u = Vertices[k];
}
// Replace each vertex with it's
// corresponding parent except
// the root vertex
if (parent[Vertices[k]] != 0)
{
Vertices[k] = parent[Vertices[k]];
}
}
let ans = true;
let flag;
for(let k = 0; k < V; k++)
{
// Checks if the ancestor
// with respect to deepest
// vertex u
if (preTime[Vertices[k]] <= preTime[u] &&
postTime[Vertices[k]] >= postTime[u])
flag = true;
else
flag = false;
// Update ans
ans = ans & flag;
}
// Print the result
if (ans)
document.write(u);
else
document.write("NO");
}
// Total vertices
let N = 10;
let V = 5;
// Given set of vertices
let Vertices = [4, 3, 8, 9, 10];
// Given edges
let Edges = [[1, 2], [1, 3],
[1, 4], [2, 5],
[2, 6], [3, 7],
[7, 8], [7, 9],
[9, 10]];
// Function call
findNodeU(N, V, Vertices, Edges);
</script>
10
Complejidad temporal: O(N + V), donde N es el total de vértices y V es el tamaño del conjunto dado.
Espacio auxiliar: O(5*N)