Título del proyecto: Detección de daños en el pavimento utilizando imágenes de drones
Introducción: La construcción y reparación del pavimento de las calles incluye una gran parte del área metropolitana de la India .
presupuestos de gastos. La inspección y el monitoreo del mantenimiento son medidas cruciales e importantes contra el desgaste del pavimento, como agujeros, desagües bloqueados, etc., que pueden reducir el peso económico de las reparaciones. Sin embargo, las mejores estrategias de evaluación de calles de su clase todavía utilizan especialistas para realizar estimaciones de problemas físicamente. Estas técnicas son con frecuencia demasiado exorbitantes, tediosas, concentradas en el trabajo y requieren una habilidad especializada. Mientras tanto, se envían cada vez más drones en lugar de administradores humanos donde los mandados son aburridos y donde el riesgo de introducirse en condiciones hostiles es alto. La automatización de la inspección vial puede introducir ganancias de eficiencia notables que pueden ayudar a las organizaciones a reaccionar ante los primeros indicios de erosión de una manera auspiciosa. En este trabajo, podemos construir un marco que envíe drones automáticos para revisar un territorio, analizar el estado de los pavimentos y registrar imágenes y direcciones de las áreas que requieren reparación. Este marco presenta otra opción para los exámenes en el terreno y las herramientas que se basan en el algoritmo de detección y reconocimiento simultáneamente para reconocer los baches. Se expande en otros arreglos algorítmicos en curso que utilizan el procesamiento de imágenes para recopilar y traducir información sobre la salud del pavimento.
Objetivo: Los resultados de esta misión se visualizarán a través de una plataforma web que no solo puede guiar a las comunidades urbanas a solidificar un costoso proceso de acumulación de información, sino también a limitar el error humano en la distinción y priorización de territorios problemáticos. El municipio puede tomar las medidas necesarias antes del monzón, temporada en la que la situación empeora.
Herramientas utilizadas:
- Hardware:
- Esta herramienta de detección de baches requiere un dron acoplado con una cámara de alta definición que se instala con la ayuda de un cardán para la estabilización de tres ejes. Este cardán corregirá cualquier vibración creada durante el vuelo y mantendrá el nivel de la cámara para cuentas de video de mayor calidad. Esta configuración permitirá un alcance de punto de cámara de 0*-90*, la posición 900 relacionada con la orientación hacia abajo requerida para este instrumento. Se instalará una unidad de almacenamiento que luego transmitirá los datos capturados a la nube cuando el dron descanse en las estaciones.
- Python
- OpenCV (Biblioteca de visión artificial de código abierto)
- Amazon Web Services (para análisis de datos)
- Procesamiento de imágenes utilizando redes neuronales recurrentes (pandas, etc.)
- También se realizarán análisis de datos que ayudarán en la planificación y el
análisis futuros.
Software:
Implementación:Los drones UAV para la recopilación de datos se pueden utilizar según las diferentes zonas de la ciudad. Una zona incluirá una cierta cantidad de puntos de estación donde el dron puede descansar o también pueden llamarse puntos de restauración para que, en caso de cualquier problema técnico o cambio en la trayectoria de vuelo propuesta, el dron pueda regresar a estas estaciones y su inspección puede ser realizada por el equipo de mantenimiento. Estas estaciones también se pueden utilizar como puntos de recarga automática. Debido al hardware pesado instalado en ellos, el gran vuelo no es práctico. Los drones se diseñarán de forma que dispongan de un punto de atraque que se conectará al docket de las estaciones de carga. Dado que los drones capturarán imágenes de alta definición con sus cámaras, un sistema para transmitir datos en drones consumirá energía. Asi que,
Marco conceptual: cuando producimos una misión autónoma para el dron, despega en la dirección inicial del camino y viaja a cada parte de toda la región sobre cada fragmento de calle hasta una coordenada de punto de ruta continua. A medida que la misión está en progreso, se ejecutará un algoritmo de identificación de baches para descomponer la transmisión de video y buscar posibles daños en el pavimento. En el momento en que se reconoce dicha área, se genera un registro en las computadoras instaladas en el dron, guardando las direcciones, la marca de tiempo y la imagen relacionada con el problema.
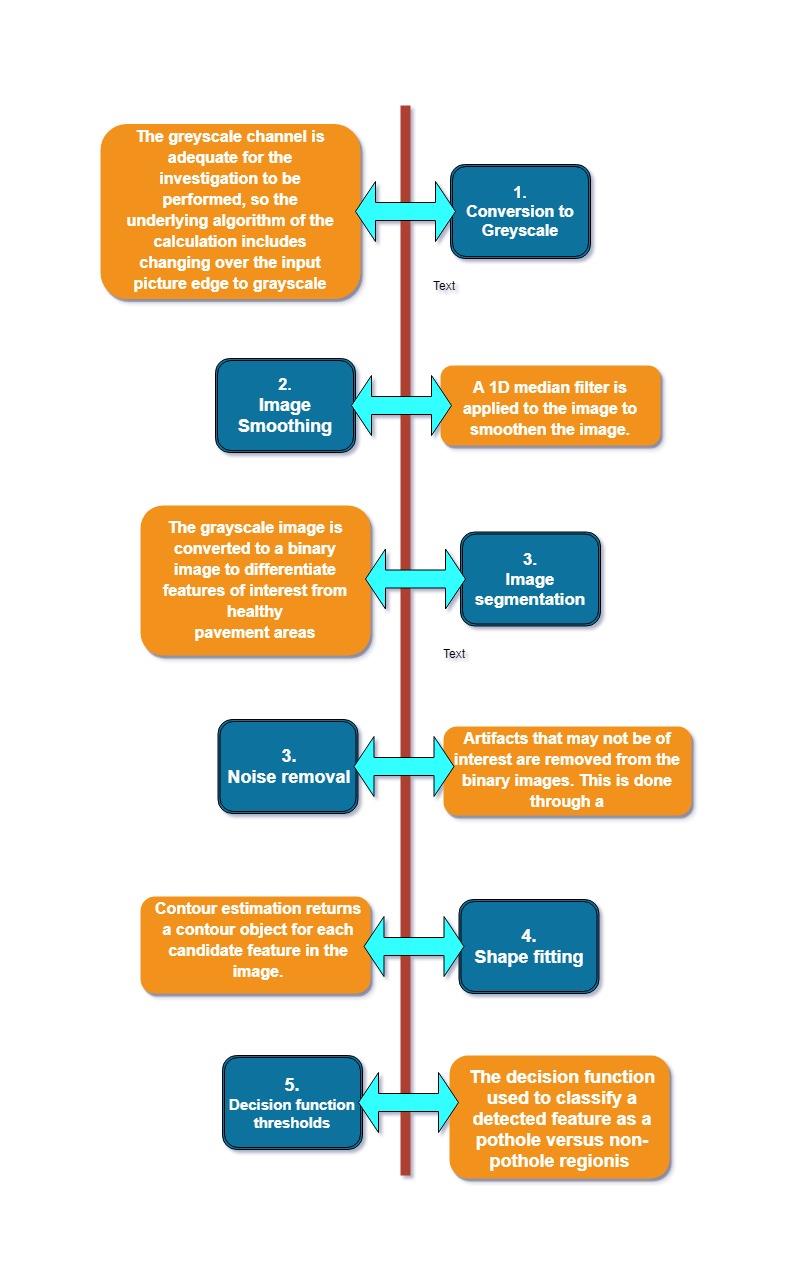
Mejoras futuras:Los futuros incrementos de este marco serían una metodología de ajuste algorítmico, que se conectará para que la segmentación de la imagen funcione con un objetivo final específico para mejorar la precisión del sistema. Otro componente esencial requerido para que este marco sea operativo en situaciones reales es la elusión de obstáculos. El marco del producto también se puede actualizar presentando sensores adicionales, como LiDAR, que pueden brindar información detallada, ya que esta información puede ayudar significativamente a determinar la gravedad de la angustia y actualizar una estrategia de priorización automática. Las ventajas de utilizar un marco de este tipo no se limitan a la investigación del deterioro del pavimento en ningún caso, ya que el instrumento puede funcionar como un sistema versátil para diferentes aplicaciones, por ejemplo, el control del tráfico y la medición del índice de calidad del aire.
Miembros del grupo:
- Suryakant Tibrewal (IIT-ISM, Dhanbad)
- Prakhar Agarwal (BITS Pilani, Goa)
- Jain Soham Dungerchand (BITS Pilani, Pilani)
- Kamini Kumari (IIT-ISM, Dhanbad)
Nota: esta idea de proyecto se contribuye para ProGeek Cup 2.0: una competencia de proyectos de GeeksforGeeks.
Publicación traducida automáticamente
Artículo escrito por GeeksforGeeks-1 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA