En la publicación anterior , presentamos B-Tree. También discutimos las funciones de búsqueda() y poligonal().
En esta publicación, se analiza la operación insert(). Siempre se inserta una nueva clave en el Node hoja. Sea k la llave a insertar. Al igual que BST, comenzamos desde la raíz y avanzamos hacia abajo hasta llegar a un Node de hoja. Una vez que llegamos a un Node de hoja, insertamos la clave en ese Node de hoja. A diferencia de los BST, tenemos un rango predefinido en la cantidad de claves que puede contener un Node. Entonces, antes de insertar una clave en el Node, nos aseguramos de que el Node tenga espacio adicional.
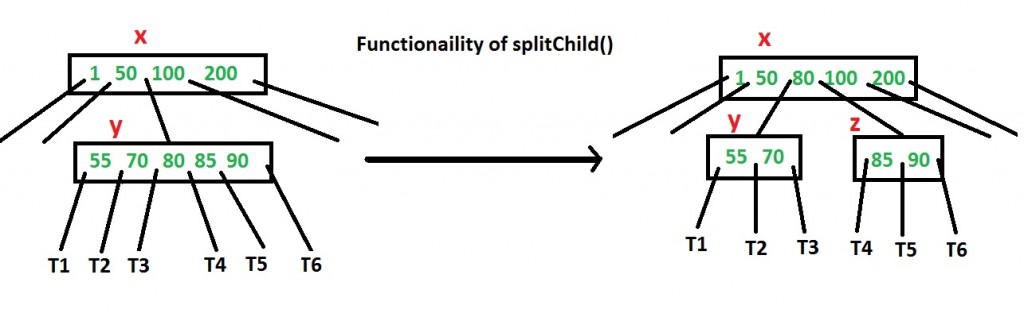
¿Cómo asegurarse de que un Node tenga espacio disponible para una clave antes de insertar la clave? Usamos una operación llamada splitChild() que se usa para dividir un elemento secundario de un Node. Consulte el siguiente diagrama para comprender la división. En el siguiente diagrama, el hijo y de x se divide en dos Nodes y y z. Tenga en cuenta que la operación splitChild mueve una tecla hacia arriba y esta es la razón por la que los árboles B crecen hacia arriba, a diferencia de los BST que crecen hacia abajo.
Como se discutió anteriormente, para insertar una nueva clave, bajamos de la raíz a la hoja. Antes de atravesar un Node, primero verificamos si el Node está lleno. Si el Node está lleno, lo dividimos para crear espacio. A continuación se muestra el algoritmo completo.
Inserción
1) Inicializar x como root.
2) Si bien x no es una hoja, haga lo siguiente
… a) Encuentre el hijo de x que será atravesado a continuación. Que el niño sea y.
.. b) Si y no está lleno, cambie x para que apunte a y.
.. c) Si y está lleno, divídalo y cambie x para que apunte a una de las dos partes de y. Si k es más pequeño que la tecla central en y, establezca x como la primera parte de y. De lo contrario, la segunda parte de y. Cuando dividimos y, movemos una clave de y a su array x.
3) El ciclo en el paso 2 se detiene cuando x es una hoja. x debe tener espacio para 1 clave adicional ya que hemos estado dividiendo todos los Nodes por adelantado. Así que simplemente inserte k en x.
Tenga en cuenta que el algoritmo sigue el libro de Cormen. En realidad es un algoritmo de inserción proactiva donde antes de bajar a un Node, lo partimos si está lleno. La ventaja de dividir antes es que nunca atravesamos un Node dos veces. Si no dividimos un Node antes de bajar a él y lo dividimos solo si se inserta una nueva clave (reactiva), podemos terminar recorriendo todos los Nodes nuevamente desde la hoja hasta la raíz. Esto sucede en los casos en que todos los Nodes en la ruta desde la raíz hasta la hoja están llenos. Entonces, cuando llegamos al Node hoja, lo dividimos y movemos una tecla hacia arriba. Mover una clave hacia arriba provocará una división en el Node principal (porque el principal ya estaba lleno). Este efecto en cascada nunca ocurre en este algoritmo de inserción proactivo. Sin embargo, hay una desventaja de esta inserción proactiva, es posible que hagamos divisiones innecesarias.
Entendamos el algoritmo con un árbol de ejemplo de grado mínimo ‘t’ como 3 y una secuencia de números enteros 10, 20, 30, 40, 50, 60, 70, 80 y 90 en un B-Tree inicialmente vacío.
Inicialmente, la raíz es NULL. Insertemos primero 10.

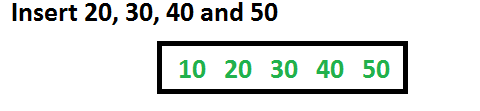
Ahora insertemos 20, 30, 40 y 50. Todos se insertarán en la raíz porque el número máximo de claves que puede acomodar un Node es 2*t – 1, que es 5.
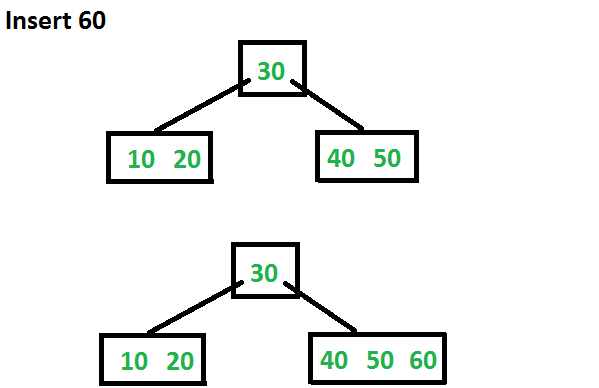
Ahora insertemos 60. Dado que el Node raíz está lleno, primero se dividirá en dos, luego 60 se insertará en el elemento secundario apropiado.
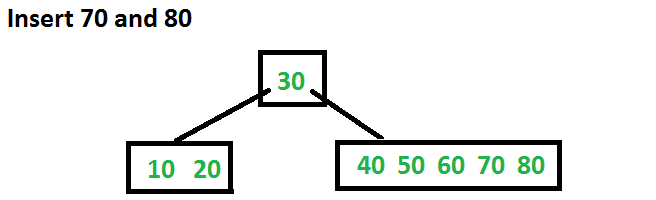
Insertemos ahora 70 y 80. Estas nuevas claves se insertarán en la hoja correspondiente sin ninguna división.
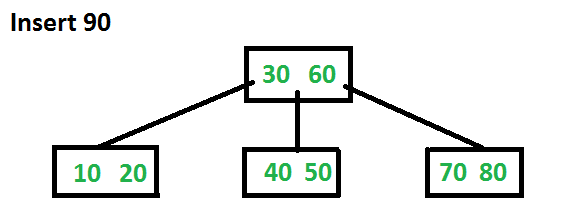
Insertemos ahora 90. Esta inserción provocará una división. La tecla del medio subirá al padre.
A continuación se muestra la implementación en C++ del algoritmo proactivo anterior.
C++
// C++ program for B-Tree insertion
#include<iostream>
using namespace std;
// A BTree node
class BTreeNode
{
int *keys; // An array of keys
int t; // Minimum degree (defines the range for number of keys)
BTreeNode **C; // An array of child pointers
int n; // Current number of keys
bool leaf; // Is true when node is leaf. Otherwise false
public:
BTreeNode(int _t, bool _leaf); // Constructor
// A utility function to insert a new key in the subtree rooted with
// this node. The assumption is, the node must be non-full when this
// function is called
void insertNonFull(int k);
// A utility function to split the child y of this node. i is index of y in
// child array C[]. The Child y must be full when this function is called
void splitChild(int i, BTreeNode *y);
// A function to traverse all nodes in a subtree rooted with this node
void traverse();
// A function to search a key in the subtree rooted with this node.
BTreeNode *search(int k); // returns NULL if k is not present.
// Make BTree friend of this so that we can access private members of this
// class in BTree functions
friend class BTree;
};
// A BTree
class BTree
{
BTreeNode *root; // Pointer to root node
int t; // Minimum degree
public:
// Constructor (Initializes tree as empty)
BTree(int _t)
{ root = NULL; t = _t; }
// function to traverse the tree
void traverse()
{ if (root != NULL) root->traverse(); }
// function to search a key in this tree
BTreeNode* search(int k)
{ return (root == NULL)? NULL : root->search(k); }
// The main function that inserts a new key in this B-Tree
void insert(int k);
};
// Constructor for BTreeNode class
BTreeNode::BTreeNode(int t1, bool leaf1)
{
// Copy the given minimum degree and leaf property
t = t1;
leaf = leaf1;
// Allocate memory for maximum number of possible keys
// and child pointers
keys = new int[2*t-1];
C = new BTreeNode *[2*t];
// Initialize the number of keys as 0
n = 0;
}
// Function to traverse all nodes in a subtree rooted with this node
void BTreeNode::traverse()
{
// There are n keys and n+1 children, traverse through n keys
// and first n children
int i;
for (i = 0; i < n; i++)
{
// If this is not leaf, then before printing key[i],
// traverse the subtree rooted with child C[i].
if (leaf == false)
C[i]->traverse();
cout << " " << keys[i];
}
// Print the subtree rooted with last child
if (leaf == false)
C[i]->traverse();
}
// Function to search key k in subtree rooted with this node
BTreeNode *BTreeNode::search(int k)
{
// Find the first key greater than or equal to k
int i = 0;
while (i < n && k > keys[i])
i++;
// If the found key is equal to k, return this node
if (keys[i] == k)
return this;
// If key is not found here and this is a leaf node
if (leaf == true)
return NULL;
// Go to the appropriate child
return C[i]->search(k);
}
// The main function that inserts a new key in this B-Tree
void BTree::insert(int k)
{
// If tree is empty
if (root == NULL)
{
// Allocate memory for root
root = new BTreeNode(t, true);
root->keys[0] = k; // Insert key
root->n = 1; // Update number of keys in root
}
else // If tree is not empty
{
// If root is full, then tree grows in height
if (root->n == 2*t-1)
{
// Allocate memory for new root
BTreeNode *s = new BTreeNode(t, false);
// Make old root as child of new root
s->C[0] = root;
// Split the old root and move 1 key to the new root
s->splitChild(0, root);
// New root has two children now. Decide which of the
// two children is going to have new key
int i = 0;
if (s->keys[0] < k)
i++;
s->C[i]->insertNonFull(k);
// Change root
root = s;
}
else // If root is not full, call insertNonFull for root
root->insertNonFull(k);
}
}
// A utility function to insert a new key in this node
// The assumption is, the node must be non-full when this
// function is called
void BTreeNode::insertNonFull(int k)
{
// Initialize index as index of rightmost element
int i = n-1;
// If this is a leaf node
if (leaf == true)
{
// The following loop does two things
// a) Finds the location of new key to be inserted
// b) Moves all greater keys to one place ahead
while (i >= 0 && keys[i] > k)
{
keys[i+1] = keys[i];
i--;
}
// Insert the new key at found location
keys[i+1] = k;
n = n+1;
}
else // If this node is not leaf
{
// Find the child which is going to have the new key
while (i >= 0 && keys[i] > k)
i--;
// See if the found child is full
if (C[i+1]->n == 2*t-1)
{
// If the child is full, then split it
splitChild(i+1, C[i+1]);
// After split, the middle key of C[i] goes up and
// C[i] is splitted into two. See which of the two
// is going to have the new key
if (keys[i+1] < k)
i++;
}
C[i+1]->insertNonFull(k);
}
}
// A utility function to split the child y of this node
// Note that y must be full when this function is called
void BTreeNode::splitChild(int i, BTreeNode *y)
{
// Create a new node which is going to store (t-1) keys
// of y
BTreeNode *z = new BTreeNode(y->t, y->leaf);
z->n = t - 1;
// Copy the last (t-1) keys of y to z
for (int j = 0; j < t-1; j++)
z->keys[j] = y->keys[j+t];
// Copy the last t children of y to z
if (y->leaf == false)
{
for (int j = 0; j < t; j++)
z->C[j] = y->C[j+t];
}
// Reduce the number of keys in y
y->n = t - 1;
// Since this node is going to have a new child,
// create space of new child
for (int j = n; j >= i+1; j--)
C[j+1] = C[j];
// Link the new child to this node
C[i+1] = z;
// A key of y will move to this node. Find the location of
// new key and move all greater keys one space ahead
for (int j = n-1; j >= i; j--)
keys[j+1] = keys[j];
// Copy the middle key of y to this node
keys[i] = y->keys[t-1];
// Increment count of keys in this node
n = n + 1;
}
// Driver program to test above functions
int main()
{
BTree t(3); // A B-Tree with minimum degree 3
t.insert(10);
t.insert(20);
t.insert(5);
t.insert(6);
t.insert(12);
t.insert(30);
t.insert(7);
t.insert(17);
cout << "Traversal of the constructed tree is ";
t.traverse();
int k = 6;
(t.search(k) != NULL)? cout << "\nPresent" : cout << "\nNot Present";
k = 15;
(t.search(k) != NULL)? cout << "\nPresent" : cout << "\nNot Present";
return 0;
}
Producción:
Traversal of the constructed tree is 5 6 7 10 12 17 20 30 Present Not Present
Referencias:
Introducción a los algoritmos 3ra edición por Clifford Stein, Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest
http://www.cs.utexas.edu/users/djimenez/utsa/cs3343/lecture17.html
Por favor escriba comentarios si encuentra algo incorrecto, o si desea compartir más información sobre el tema tratado anteriormente.
Publicación traducida automáticamente
Artículo escrito por GeeksforGeeks-1 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA