Operador Robert: este operador basado en gradientes calcula la suma de los cuadrados de las diferencias entre los píxeles diagonalmente adyacentes en una imagen a través de la diferenciación discreta. Luego se realiza la aproximación del gradiente. Utiliza los siguientes núcleos o máscaras 2 x 2:
![\[M_{x}=\left[\begin{array}{ccc}1 & 0 \\ 0 & -1\end{array}\right] \quad M_{y}=\left[\begin{array}{ccc}0 & 1 \\ -1 & 0\end{array}\right]\]](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-8b3f0084cf55a7c500a33e98755b703a_l3.png "Rendered by QuickLaTeX.com")
Acercarse:
Paso 1: Ingresar: leer una imagen
Paso 2: Convertir la imagen RGB de color verdadero en una imagen en escala de grises
Paso 3: Convertir la imagen a doble
Paso 4: Preasignar la array de imagen_filtrada con ceros
Paso 5: Definir la máscara de operador Robert
Paso 6 : Proceso de detección de bordes (Calcule la aproximación del gradiente y la magnitud del vector)
Paso 7: Muestre la imagen filtrada
Paso 8: Umbral en la imagen filtrada
Paso 9: Muestre la imagen detectada por el borde
Implementación en MATLAB:
% MATLAB Code | Robert Operator from Scratch
% Read Input Image
input_image = imread('[name of input image file].[file format]');
% Displaying Input Image
input_image = uint8(input_image);
figure, imshow(input_image); title('Input Image');
% Convert the truecolor RGB image to the grayscale image
input_image = rgb2gray(input_image);
% Convert the image to double
input_image = double(input_image);
% Pre-allocate the filtered_image matrix with zeros
filtered_image = zeros(size(input_image));
% Robert Operator Mask
Mx = [1 0; 0 -1];
My = [0 1; -1 0];
% Edge Detection Process
% When i = 1 and j = 1, then filtered_image pixel
% position will be filtered_image(1, 1)
% The mask is of 2x2, so we need to traverse
% to filtered_image(size(input_image, 1) - 1
%, size(input_image, 2) - 1)
for i = 1:size(input_image, 1) - 1
for j = 1:size(input_image, 2) - 1
% Gradient approximations
Gx = sum(sum(Mx.*input_image(i:i+1, j:j+1)));
Gy = sum(sum(My.*input_image(i:i+1, j:j+1)));
% Calculate magnitude of vector
filtered_image(i, j) = sqrt(Gx.^2 + Gy.^2);
end
end
% Displaying Filtered Image
filtered_image = uint8(filtered_image);
figure, imshow(filtered_image); title('Filtered Image');
% Define a threshold value
thresholdValue = 100; % varies between [0 255]
output_image = max(filtered_image, thresholdValue);
output_image(output_image == round(thresholdValue)) = 0;
% Displaying Output Image
output_image = im2bw(output_image);
figure, imshow(output_image); title('Edge Detected Image');
Imagen de entrada –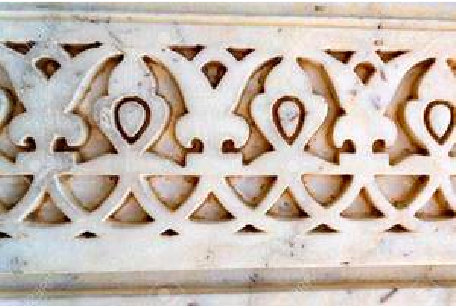
Imagen filtrada: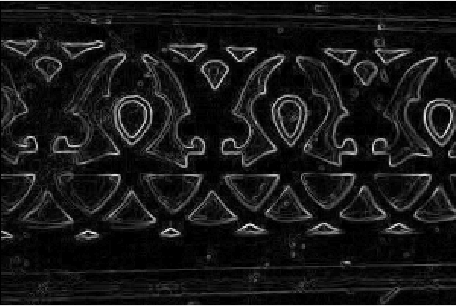
Imagen de borde detectado: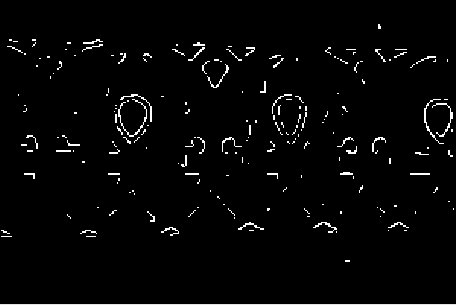
ventajas:
- La detección de bordes y la orientación son muy fáciles.
- Se conservan los puntos de dirección diagonal
Limitaciones:
- Muy sensible al ruido
- No es muy preciso en la detección de bordes.
Publicación traducida automáticamente
Artículo escrito por goodday451999 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA