Dada una cuadrícula M*N y dada una array startPos[] , que indica que la posición inicial es la celda (startPos[0] , startPos[1]) y la array homePos[] que indica que su destino está en la celda (homePos[ 0], posición de inicio[1]).
Desde cualquier celda, el movimiento solo está permitido en cuatro direcciones: izquierda, derecha, arriba y abajo, y no puede salir del límite. Se dan dos arrays de enteros indexados a 0 : rowCosts[] de longitud M y colCosts[] de longitud N que denota los costes de los movimientos.
Si hay un movimiento hacia arriba o hacia abajo en una celda con la fila r , el costo del movimiento es rowCosts[r] . De manera similar, si se realiza un movimiento hacia la izquierda o hacia la derecha en una celda adyacente c , el movimiento cuesta colCosts .
Devuelve el costo total mínimo para viajar desde el origen hasta el destino.
Nota: No hay costo negativo asociado con ningún movimiento.
Ejemplos:
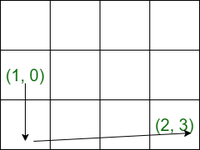
Entrada: M = 3, N = 4, startPos[] = {1, 0}, homePos[] = {2, 3}, rowCosts[] = {5, 4, 3}, colCosts[] = {8, 2 , 6, 7}
Salida: 18
Explicación: Un camino ideal es:
- Comienza en (1, 0) y desciende a (2, 0). Este movimiento cuesta rowCosts[2] = 3.
- Va directo a (2, 1). Este movimiento cuesta colCosts[1] = 2.
- Va directamente a (2, 2). Este movimiento cuesta colCosts[2] = 6.
- Va directo a (2, 3). Este movimiento cuesta colCosts[3] = 7.
- El costo total es 3 + 2 + 6 + 7 = 18.
El movimiento se muestra en la siguiente imagen:
Entrada: M = 3, N = 4, startPos[] = {0, 0}, homePos[] = {0, 0}, rowCosts[] = {5, 4, 3}, colCosts[] = {8, 2 , 6, 7}
Salida: 0
Explicación: La posición de inicio y el destino son iguales. Así que no hay coste de movimiento.
Enfoque: La solución se basa en la observación:
Para llegar al destino con un costo mínimo, solo se deben cruzar las filas que se encuentran en el rango [startPos[0], homePos[0]] y las columnas que se encuentran en el rango [startPos[1], homePos[1]] .
Motivo: cruzar cualquier otra fila o columna agregará un costo adicional ya que todos los movimientos tienen un costo positivo y la cantidad de movimientos aumenta con el cruce adicional de filas y columnas.
Por lo tanto, el costo de cada fila y columna entre las posiciones de inicio y de inicio se incurrirá exactamente una vez. Calcule el costo de moverse entre las filas homePos[0] y startPos[0] . y las columnas homePos[1] y startPos[1] . Siga los pasos a continuación para resolver el problema:
- Inicialice las variables rmin, cmin como el mínimo de la posición inicial y final.
- Inicialice las variables rmax, cmax como el máximo de la posición inicial y final.
- Itere sobre el rango [rmin, rmax] usando la variable i y realice las siguientes tareas:
- Agregue el valor rowCosts[i] a la variable ans.
- Itere sobre el rango [cmin, cmax] usando la variable i y realice las siguientes tareas:
- Agregue el valor colCosts[i] a la variable ans.
- Reste los valores rowCosts[startPos[0]], colCosts[startPos[1]] de la variable ans.
- Después de realizar los pasos anteriores, imprima el valor de ans como respuesta.
A continuación se muestra la implementación del enfoque anterior.
C++
// C++ program for the above approach
#include <bits/stdc++.h>
using namespace std;
// Function to find the minimum cost
int minPathCost(vector<int>& startPos,
vector<int>& homePos,
vector<int>& rowCosts,
vector<int>& colCosts)
{
int ans = 0;
int rmin = min(startPos[0], homePos[0]);
int rmax = max(startPos[0], homePos[0]);
int cmin = min(startPos[1], homePos[1]);
int cmax = max(startPos[1], homePos[1]);
// Determine the cost of the rows
// that cross the path.
for (int i = rmin; i <= rmax; i++)
ans += rowCosts[i];
// Determine the cost of the cols
// that cross the path.
for (int i = cmin; i <= cmax; i++)
ans += colCosts[i];
// Starting coordinates need to be
// excluded from the final result
ans -= rowCosts[startPos[0]];
ans -= colCosts[startPos[1]];
return ans;
}
// Driver Code
int main()
{
vector<int> startpos{ 1, 0 };
vector<int> homepos{ 2, 3 };
vector<int> roscost{ 5, 4, 3 };
vector<int> colcst{ 8, 2, 6, 7 };
cout << minPathCost(startpos, homepos,
roscost, colcst);
return 0;
}
Java
// Java code to implement the above approach
import java.util.*;
public class GFG
{
// Function to find the minimum cost
static int minPathCost(int []startPos,
int []homePos,
int []rowCosts,
int []colCosts)
{
int ans = 0;
int rmin = Math.min(startPos[0], homePos[0]);
int rmax = Math.max(startPos[0], homePos[0]);
int cmin = Math.min(startPos[1], homePos[1]);
int cmax = Math.max(startPos[1], homePos[1]);
// Determine the cost of the rows
// that cross the path.
for (int i = rmin; i <= rmax; i++)
ans += rowCosts[i];
// Determine the cost of the cols
// that cross the path.
for (int i = cmin; i <= cmax; i++)
ans += colCosts[i];
// Starting coordinates need to be
// excluded from the final result
ans -= rowCosts[startPos[0]];
ans -= colCosts[startPos[1]];
return ans;
}
// Driver code
public static void main(String args[])
{
int []startpos = { 1, 0 };
int []homepos = { 2, 3 };
int []roscost = { 5, 4, 3 };
int []colcst = { 8, 2, 6, 7 };
System.out.println( minPathCost(startpos, homepos,
roscost, colcst));
}
}
// This code is contributed by Samim Hossain Mondal.
Python3
# Python code to implement the above approach # Function to find the minimum cost def minPathCost(startPos, homePos, rowCosts, colCosts): ans = 0; rmin = min(startPos[0], homePos[0]); rmax = max(startPos[0], homePos[0]); cmin = min(startPos[1], homePos[1]); cmax = max(startPos[1], homePos[1]); # Determine the cost of the rows # that cross the path. for i in range(rmin,rmax+1): ans += rowCosts[i]; # Determine the cost of the cols # that cross the path. for i in range(cmin, cmax + 1): ans += colCosts[i]; # Starting coordinates need to be # excluded from the final result ans -= rowCosts[startPos[0]]; ans -= colCosts[startPos[1]]; return ans; # Driver code if __name__ == '__main__': startpos = [1, 0]; homepos = [2, 3]; roscost = [5, 4, 3]; colcst = [8, 2, 6, 7]; print(minPathCost(startpos, homepos, roscost, colcst)); # This code is contributed by 29AjayKumar
C#
// C# code to implement the above approach
using System;
public class GFG
{
// Function to find the minimum cost
static int minPathCost(int []startPos,
int []homePos,
int []rowCosts,
int []colCosts)
{
int ans = 0;
int rmin = Math.Min(startPos[0], homePos[0]);
int rmax = Math.Max(startPos[0], homePos[0]);
int cmin = Math.Min(startPos[1], homePos[1]);
int cmax = Math.Max(startPos[1], homePos[1]);
// Determine the cost of the rows
// that cross the path.
for (int i = rmin; i <= rmax; i++)
ans += rowCosts[i];
// Determine the cost of the cols
// that cross the path.
for (int i = cmin; i <= cmax; i++)
ans += colCosts[i];
// Starting coordinates need to be
// excluded from the readonly result
ans -= rowCosts[startPos[0]];
ans -= colCosts[startPos[1]];
return ans;
}
// Driver code
public static void Main(String []args)
{
int []startpos = { 1, 0 };
int []homepos = { 2, 3 };
int []roscost = { 5, 4, 3 };
int []colcst = { 8, 2, 6, 7 };
Console.WriteLine( minPathCost(startpos, homepos,
roscost, colcst));
}
}
// This code is contributed by 29AjayKumar
Javascript
<script>
// JavaScript program for the above approach
// Function to find the minimum cost
function minPathCost(startPos, homePos,
rowCosts, colCosts)
{
let ans = 0;
let rmin = Math.min(startPos[0], homePos[0]);
let rmax = Math.max(startPos[0], homePos[0]);
let cmin = Math.min(startPos[1], homePos[1]);
let cmax = Math.max(startPos[1], homePos[1]);
// Determine the cost of the rows
// that cross the path.
for(let i = rmin; i <= rmax; i++)
ans += rowCosts[i];
// Determine the cost of the cols
// that cross the path.
for(let i = cmin; i <= cmax; i++)
ans += colCosts[i];
// Starting coordinates need to be
// excluded from the final result
ans -= rowCosts[startPos[0]];
ans -= colCosts[startPos[1]];
return ans;
}
// Driver Code
let startpos = [ 1, 0 ];
let homepos = [ 2, 3 ];
let roscost = [ 5, 4, 3 ];
let colcst = [ 8, 2, 6, 7 ];
document.write(minPathCost(startpos, homepos,
roscost, colcst));
// This code is contributed by Potta Lokesh
</script>
18
Complejidad temporal: O(M + N)
Espacio auxiliar: O(1)
Publicación traducida automáticamente
Artículo escrito por rishabhbatra53 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA