Los bordes son cambios locales significativos de intensidad en una imagen digital. Un borde se puede definir como un conjunto de píxeles conectados que forman un límite entre dos regiones separadas. Hay tres tipos de bordes:
- Bordes horizontales
- Bordes verticales
- Bordes diagonales
La detección de bordes es un método para segmentar una imagen en regiones de discontinuidad. Es una técnica ampliamente utilizada en el procesamiento de imágenes digitales como
- reconocimiento de patrones
- morfología de la imagen
- extracción de características
La detección de bordes permite a los usuarios observar las características de una imagen en busca de un cambio significativo en el nivel de gris. Esta textura indica el final de una región de la imagen y el comienzo de otra. Reduce la cantidad de datos en una imagen y conserva las propiedades estructurales de una imagen.
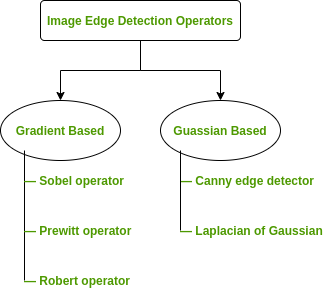
Los operadores de detección de bordes son de dos tipos:
- Operador basado en gradiente que calcula derivaciones de primer orden en una imagen digital como, operador de Sobel, operador de Prewitt, operador de Robert
- Operador basado en gaussiano que calcula derivaciones de segundo orden en una imagen digital como, detector de bordes Canny, laplaciano de gaussiano
Operador de Sobel: Es un operador de diferenciación discreta. Calcula la aproximación de gradiente de la función de intensidad de imagen para la detección de bordes de imagen. En los píxeles de una imagen, el operador de Sobel produce la normal a un vector o el vector de gradiente correspondiente. Utiliza dos núcleos o máscaras de 3 x 3 que se convolucionan con la imagen de entrada para calcular las aproximaciones derivadas vertical y horizontal respectivamente:
![\[M_{x}=\left[\begin{array}{ccc}-1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1\end{array}\right] \quad M_{y}=\left[\begin{array}{ccc}-1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1\end{array}\right]\]](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-dc9c540131e9d1aedccb056d0f891cf5_l3.png "Rendered by QuickLaTeX.com")
ventajas:
- Cálculo simple y eficiente en el tiempo
- Muy fácil en la búsqueda de bordes suaves
Limitaciones:
- Los puntos de dirección diagonal no se conservan siempre
- Muy sensible al ruido
- No es muy preciso en la detección de bordes.
- Detectar con bordes gruesos y ásperos no da resultados apropiados
Operador de Prewitt: este operador es casi similar al operador sobel. También detecta los bordes verticales y horizontales de una imagen. Es una de las mejores formas de detectar la orientación y la magnitud de una imagen. Utiliza los núcleos o máscaras –
![\[M_{x}=\left[\begin{array}{ccc}-1 & 0 & 1 \\ -1 & 0 & 1 \\ -1 & 0 & 1\end{array}\right] \quad M_{y}=\left[\begin{array}{ccc}-1 & -1 & -1 \\ 0 & 0 & 0 \\ 1 & 1 & 1\end{array}\right]\]](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-bb28b93d31423378afd8c590a494c3e7_l3.png "Rendered by QuickLaTeX.com")
ventajas:
- Buen rendimiento en la detección de bordes verticales y horizontales.
- Mejor operador para detectar la orientación de una imagen
Limitaciones:
- La magnitud del coeficiente es fija y no se puede cambiar.
- Los puntos de dirección diagonal no se conservan siempre
Operador Robert: este operador basado en gradientes calcula la suma de los cuadrados de las diferencias entre los píxeles diagonalmente adyacentes en una imagen a través de la diferenciación discreta. Luego se realiza la aproximación del gradiente. Utiliza los siguientes núcleos o máscaras 2 x 2:
![\[M_{x}=\left[\begin{array}{ccc}1 & 0 \\ 0 & -1\end{array}\right] \quad M_{y}=\left[\begin{array}{ccc}0 & 1 \\ -1 & 0\end{array}\right]\]](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-8acae7f70c0cebe173626c4ac9c8e5c0_l3.png "Rendered by QuickLaTeX.com")
ventajas:
- La detección de bordes y la orientación son muy fáciles.
- Se conservan los puntos de dirección diagonal
Limitaciones:
- Muy sensible al ruido
- No es muy preciso en la detección de bordes.
Operador Marr-Hildreth o Laplaciano de Gauss (LoG): Es un operador de base gaussiana que utiliza el Laplaciano para tomar la segunda derivada de una imagen. Esto realmente funciona bien cuando la transición del nivel de gris parece ser abrupta. Funciona con el método de cruce por cero, es decir, cuando la derivada de segundo orden cruza por cero, esa ubicación en particular corresponde a un nivel máximo. Se llama una ubicación de borde. Aquí el operador gaussiano reduce el ruido y el operador laplaciano detecta los bordes afilados.
La función gaussiana se define mediante la fórmula:
![\[G(x, y)=\frac{1}{\sqrt{2 \pi \sigma^{2}}} \exp -\left(\frac{x^{2}+y^{2}}{2 \sigma^{2}}\right)\]](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-8272856c260741c471a1f3032b034f6b_l3.png "Rendered by QuickLaTeX.com")
Dónde

es la desviación estándar.
Y el operador LoG se calcula a partir de
![\[\mathrm{LoG}=\frac{\partial^{2}}{\partial x^{2}} G(x, y)+\frac{\partial^{2}}{\partial y^{2}} G(x, y)=\frac{x^{2}+y^{2}-2 \sigma^{2}}{\sigma^{4}} \exp \left(-\frac{x^{2}+y^{2}}{2 \sigma^{2}}\right)\]](https://www.geeksforgeeks.org/wp-content/ql-cache/quicklatex.com-ee2c071b1475573afc2f369d810deba7_l3.png "Rendered by QuickLaTeX.com")
ventajas:
- Bordes fáciles de detectar y sus diversas orientaciones.
- Hay características fijas en todas las direcciones.
Limitaciones:
- Muy sensible al ruido
- El error de localización puede ser grave en los bordes curvos
- Genera respuestas ruidosas que no se corresponden con los bordes, los llamados “bordes falsos”
Canny Operator: Es un operador basado en Gauss para detectar bordes. Este operador no es susceptible al ruido. Extrae características de la imagen sin afectar o alterar la característica. El detector de bordes Canny tiene un algoritmo avanzado derivado del trabajo anterior del operador Laplaciano de Gauss. Es una técnica de detección de bordes óptima ampliamente utilizada. Detecta bordes en función de tres criterios:
- Tasa de error baja
- Los puntos de los bordes deben localizarse con precisión
- Debería haber una sola respuesta de borde.
ventajas:
- Tiene buena localización.
- Extrae las características de la imagen sin alterar las características.
- Menos sensible al ruido
Limitaciones:
- Hay falso cruce por cero
- Cálculo complejo y lento
Algunas aplicaciones del mundo real de la detección de bordes de imagen:
- imágenes médicas, estudio de la estructura anatómica
- localizar un objeto en imágenes de satélite
- sistemas automáticos de control de tráfico
- reconocimiento facial y reconocimiento de huellas dactilares
Publicación traducida automáticamente
Artículo escrito por goodday451999 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA