Dado un conjunto de ciudades y la distancia entre cada par de ciudades, el problema es encontrar el recorrido más corto posible que visite cada ciudad exactamente una vez y regrese al punto de partida.
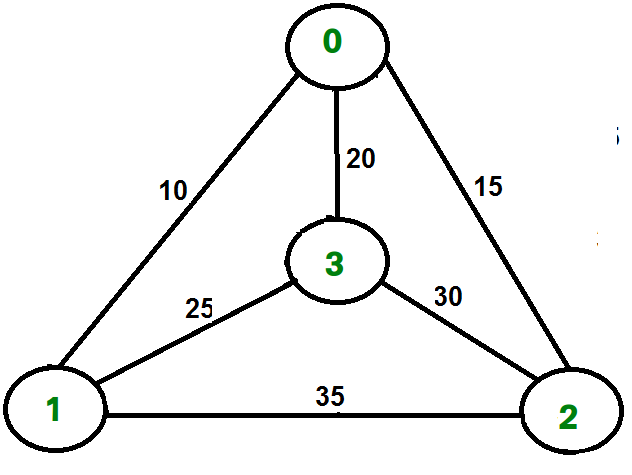
Por ejemplo, considere el gráfico que se muestra en la figura del lado derecho. Un recorrido TSP en el gráfico es 0-1-3-2-0. El costo del recorrido es 10+25+30+15, que es 80.
Hemos discutido las siguientes soluciones
1) Programación ingenua y dinámica
2) Solución aproximada usando MST
Branch and Bound Solution
Como se vio en los artículos anteriores, en el método Branch and Bound , para el Node actual en el árbol, calculamos un límite en la mejor solución posible que podemos obtener si bajamos este Node. Si el límite de la mejor solución posible en sí es peor que la mejor actual (la mejor calculada hasta ahora), ignoramos el subárbol enraizado con el Node.
Tenga en cuenta que el costo a través de un Node incluye dos costos.
1) Costo de llegar al Node desde la raíz (cuando llegamos a un Node, calculamos este costo)
2) Costo de llegar a una respuesta desde el Node actual hasta una hoja (Calculamos un límite en este costo para decidir si ignoramos el subárbol con este Node o no).
- En los casos de un problema de maximización , un límite superior nos dice la solución máxima posible si seguimos el Node dado. Por ejemplo, en la mochila 0/1 usamos el enfoque Greedy para encontrar un límite superior .
- En los casos de un problema de minimización , un límite inferior nos dice la solución mínima posible si seguimos el Node dado. Por ejemplo, en el Problema de asignación de trabajo , obtenemos un límite inferior al asignar el trabajo de menor costo a un trabajador.
En ramificar y acotar, la parte desafiante es encontrar una manera de calcular un límite en la mejor solución posible. A continuación se muestra una idea utilizada para calcular los límites del problema del viajante de comercio.
El costo de cualquier recorrido se puede escribir de la siguiente manera.
Cost of a tour T = (1/2) * ∑ (Sum of cost of two edges
adjacent to u and in the
tour T)
where u ∈ V
For every vertex u, if we consider two edges through it in T,
and sum their costs. The overall sum for all vertices would
be twice of cost of tour T (We have considered every edge
twice.)
(Sum of two tour edges adjacent to u) >= (sum of minimum weight
two edges adjacent to
u)
Cost of any tour >= 1/2) * ∑ (Sum of cost of two minimum
weight edges adjacent to u)
where u ∈ V
Por ejemplo, considere el gráfico que se muestra arriba. A continuación se muestran dos bordes de costo mínimo adyacentes a cada Node.
Node Least cost edges Total cost
0 (0, 1), (0, 2) 25
1 (0, 1), (1, 3) 35
2 (0, 2), (2, 3) 45
3 (0, 3), (1, 3) 45
Thus a lower bound on the cost of any tour =
1/2(25 + 35 + 45 + 45)
= 75
Refer this for one more example.
Ahora tenemos una idea sobre el cálculo del límite inferior. Veamos cómo aplicarlo árbol de búsqueda de espacio de estado. Comenzamos enumerando todos los Nodes posibles (preferiblemente en orden lexicográfico)
1. El Node raíz: sin pérdida de generalidad, asumimos que comenzamos en el vértice «0» para el cual se calculó el límite inferior anteriormente.
Tratando con el Nivel 2: El siguiente nivel enumera todos los vértices posibles a los que podemos ir (teniendo en cuenta que en cualquier camino un vértice tiene que ocurrir solo una vez) que son, 1, 2, 3… n (Observe que el gráfico está completo) . Considere que estamos calculando para el vértice 1, ya que pasamos de 0 a 1, nuestro recorrido ahora ha incluido el borde 0-1. Esto nos permite hacer los cambios necesarios en el límite inferior de la raíz.
Lower Bound for vertex 1 =
Old lower bound - ((minimum edge cost of 0 +
minimum edge cost of 1) / 2)
+ (edge cost 0-1)
¿Como funciona? Para incluir el borde 0-1, sumamos el costo del borde de 0-1 y restamos un peso del borde tal que el límite inferior permanezca lo más ajustado posible, que sería la suma de los bordes mínimos de 0 y 1 dividido por 2. Claramente , la arista restada no puede ser menor que esto.
Tratar con otros niveles: a medida que avanzamos al siguiente nivel, enumeramos nuevamente todos los vértices posibles. Para el caso anterior que va más allá de 1, buscamos 2, 3, 4, …n.
Considere el límite inferior para 2 a medida que pasamos de 1 a 1, incluimos el borde 1-2 en el recorrido y modificamos el nuevo límite inferior para este Node.
Lower bound(2) =
Old lower bound - ((second minimum edge cost of 1 +
minimum edge cost of 2)/2)
+ edge cost 1-2)
Nota: El único cambio en la fórmula es que esta vez hemos incluido el segundo costo de borde mínimo para 1, porque el costo de borde mínimo ya se restó en el nivel anterior.
C++
// C++ program to solve Traveling Salesman Problem
// using Branch and Bound.
#include <bits/stdc++.h>
using namespace std;
const int N = 4;
// final_path[] stores the final solution ie, the
// path of the salesman.
int final_path[N+1];
// visited[] keeps track of the already visited nodes
// in a particular path
bool visited[N];
// Stores the final minimum weight of shortest tour.
int final_res = INT_MAX;
// Function to copy temporary solution to
// the final solution
void copyToFinal(int curr_path[])
{
for (int i=0; i<N; i++)
final_path[i] = curr_path[i];
final_path[N] = curr_path[0];
}
// Function to find the minimum edge cost
// having an end at the vertex i
int firstMin(int adj[N][N], int i)
{
int min = INT_MAX;
for (int k=0; k<N; k++)
if (adj[i][k]<min && i != k)
min = adj[i][k];
return min;
}
// function to find the second minimum edge cost
// having an end at the vertex i
int secondMin(int adj[N][N], int i)
{
int first = INT_MAX, second = INT_MAX;
for (int j=0; j<N; j++)
{
if (i == j)
continue;
if (adj[i][j] <= first)
{
second = first;
first = adj[i][j];
}
else if (adj[i][j] <= second &&
adj[i][j] != first)
second = adj[i][j];
}
return second;
}
// function that takes as arguments:
// curr_bound -> lower bound of the root node
// curr_weight-> stores the weight of the path so far
// level-> current level while moving in the search
// space tree
// curr_path[] -> where the solution is being stored which
// would later be copied to final_path[]
void TSPRec(int adj[N][N], int curr_bound, int curr_weight,
int level, int curr_path[])
{
// base case is when we have reached level N which
// means we have covered all the nodes once
if (level==N)
{
// check if there is an edge from last vertex in
// path back to the first vertex
if (adj[curr_path[level-1]][curr_path[0]] != 0)
{
// curr_res has the total weight of the
// solution we got
int curr_res = curr_weight +
adj[curr_path[level-1]][curr_path[0]];
// Update final result and final path if
// current result is better.
if (curr_res < final_res)
{
copyToFinal(curr_path);
final_res = curr_res;
}
}
return;
}
// for any other level iterate for all vertices to
// build the search space tree recursively
for (int i=0; i<N; i++)
{
// Consider next vertex if it is not same (diagonal
// entry in adjacency matrix and not visited
// already)
if (adj[curr_path[level-1]][i] != 0 &&
visited[i] == false)
{
int temp = curr_bound;
curr_weight += adj[curr_path[level-1]][i];
// different computation of curr_bound for
// level 2 from the other levels
if (level==1)
curr_bound -= ((firstMin(adj, curr_path[level-1]) +
firstMin(adj, i))/2);
else
curr_bound -= ((secondMin(adj, curr_path[level-1]) +
firstMin(adj, i))/2);
// curr_bound + curr_weight is the actual lower bound
// for the node that we have arrived on
// If current lower bound < final_res, we need to explore
// the node further
if (curr_bound + curr_weight < final_res)
{
curr_path[level] = i;
visited[i] = true;
// call TSPRec for the next level
TSPRec(adj, curr_bound, curr_weight, level+1,
curr_path);
}
// Else we have to prune the node by resetting
// all changes to curr_weight and curr_bound
curr_weight -= adj[curr_path[level-1]][i];
curr_bound = temp;
// Also reset the visited array
memset(visited, false, sizeof(visited));
for (int j=0; j<=level-1; j++)
visited[curr_path[j]] = true;
}
}
}
// This function sets up final_path[]
void TSP(int adj[N][N])
{
int curr_path[N+1];
// Calculate initial lower bound for the root node
// using the formula 1/2 * (sum of first min +
// second min) for all edges.
// Also initialize the curr_path and visited array
int curr_bound = 0;
memset(curr_path, -1, sizeof(curr_path));
memset(visited, 0, sizeof(curr_path));
// Compute initial bound
for (int i=0; i<N; i++)
curr_bound += (firstMin(adj, i) +
secondMin(adj, i));
// Rounding off the lower bound to an integer
curr_bound = (curr_bound&1)? curr_bound/2 + 1 :
curr_bound/2;
// We start at vertex 1 so the first vertex
// in curr_path[] is 0
visited[0] = true;
curr_path[0] = 0;
// Call to TSPRec for curr_weight equal to
// 0 and level 1
TSPRec(adj, curr_bound, 0, 1, curr_path);
}
// Driver code
int main()
{
//Adjacency matrix for the given graph
int adj[N][N] = { {0, 10, 15, 20},
{10, 0, 35, 25},
{15, 35, 0, 30},
{20, 25, 30, 0}
};
TSP(adj);
printf("Minimum cost : %d\n", final_res);
printf("Path Taken : ");
for (int i=0; i<=N; i++)
printf("%d ", final_path[i]);
return 0;
}
Java
// Java program to solve Traveling Salesman Problem
// using Branch and Bound.
import java.util.*;
class GFG
{
static int N = 4;
// final_path[] stores the final solution ie, the
// path of the salesman.
static int final_path[] = new int[N + 1];
// visited[] keeps track of the already visited nodes
// in a particular path
static boolean visited[] = new boolean[N];
// Stores the final minimum weight of shortest tour.
static int final_res = Integer.MAX_VALUE;
// Function to copy temporary solution to
// the final solution
static void copyToFinal(int curr_path[])
{
for (int i = 0; i < N; i++)
final_path[i] = curr_path[i];
final_path[N] = curr_path[0];
}
// Function to find the minimum edge cost
// having an end at the vertex i
static int firstMin(int adj[][], int i)
{
int min = Integer.MAX_VALUE;
for (int k = 0; k < N; k++)
if (adj[i][k] < min && i != k)
min = adj[i][k];
return min;
}
// function to find the second minimum edge cost
// having an end at the vertex i
static int secondMin(int adj[][], int i)
{
int first = Integer.MAX_VALUE, second = Integer.MAX_VALUE;
for (int j=0; j<N; j++)
{
if (i == j)
continue;
if (adj[i][j] <= first)
{
second = first;
first = adj[i][j];
}
else if (adj[i][j] <= second &&
adj[i][j] != first)
second = adj[i][j];
}
return second;
}
// function that takes as arguments:
// curr_bound -> lower bound of the root node
// curr_weight-> stores the weight of the path so far
// level-> current level while moving in the search
// space tree
// curr_path[] -> where the solution is being stored which
// would later be copied to final_path[]
static void TSPRec(int adj[][], int curr_bound, int curr_weight,
int level, int curr_path[])
{
// base case is when we have reached level N which
// means we have covered all the nodes once
if (level == N)
{
// check if there is an edge from last vertex in
// path back to the first vertex
if (adj[curr_path[level - 1]][curr_path[0]] != 0)
{
// curr_res has the total weight of the
// solution we got
int curr_res = curr_weight +
adj[curr_path[level-1]][curr_path[0]];
// Update final result and final path if
// current result is better.
if (curr_res < final_res)
{
copyToFinal(curr_path);
final_res = curr_res;
}
}
return;
}
// for any other level iterate for all vertices to
// build the search space tree recursively
for (int i = 0; i < N; i++)
{
// Consider next vertex if it is not same (diagonal
// entry in adjacency matrix and not visited
// already)
if (adj[curr_path[level-1]][i] != 0 &&
visited[i] == false)
{
int temp = curr_bound;
curr_weight += adj[curr_path[level - 1]][i];
// different computation of curr_bound for
// level 2 from the other levels
if (level==1)
curr_bound -= ((firstMin(adj, curr_path[level - 1]) +
firstMin(adj, i))/2);
else
curr_bound -= ((secondMin(adj, curr_path[level - 1]) +
firstMin(adj, i))/2);
// curr_bound + curr_weight is the actual lower bound
// for the node that we have arrived on
// If current lower bound < final_res, we need to explore
// the node further
if (curr_bound + curr_weight < final_res)
{
curr_path[level] = i;
visited[i] = true;
// call TSPRec for the next level
TSPRec(adj, curr_bound, curr_weight, level + 1,
curr_path);
}
// Else we have to prune the node by resetting
// all changes to curr_weight and curr_bound
curr_weight -= adj[curr_path[level-1]][i];
curr_bound = temp;
// Also reset the visited array
Arrays.fill(visited,false);
for (int j = 0; j <= level - 1; j++)
visited[curr_path[j]] = true;
}
}
}
// This function sets up final_path[]
static void TSP(int adj[][])
{
int curr_path[] = new int[N + 1];
// Calculate initial lower bound for the root node
// using the formula 1/2 * (sum of first min +
// second min) for all edges.
// Also initialize the curr_path and visited array
int curr_bound = 0;
Arrays.fill(curr_path, -1);
Arrays.fill(visited, false);
// Compute initial bound
for (int i = 0; i < N; i++)
curr_bound += (firstMin(adj, i) +
secondMin(adj, i));
// Rounding off the lower bound to an integer
curr_bound = (curr_bound==1)? curr_bound/2 + 1 :
curr_bound/2;
// We start at vertex 1 so the first vertex
// in curr_path[] is 0
visited[0] = true;
curr_path[0] = 0;
// Call to TSPRec for curr_weight equal to
// 0 and level 1
TSPRec(adj, curr_bound, 0, 1, curr_path);
}
// Driver code
public static void main(String[] args)
{
//Adjacency matrix for the given graph
int adj[][] = {{0, 10, 15, 20},
{10, 0, 35, 25},
{15, 35, 0, 30},
{20, 25, 30, 0} };
TSP(adj);
System.out.printf("Minimum cost : %d\n", final_res);
System.out.printf("Path Taken : ");
for (int i = 0; i <= N; i++)
{
System.out.printf("%d ", final_path[i]);
}
}
}
/* This code contributed by PrinciRaj1992 */
Python3
# Python3 program to solve
# Traveling Salesman Problem using
# Branch and Bound.
import math
maxsize = float('inf')
# Function to copy temporary solution
# to the final solution
def copyToFinal(curr_path):
final_path[:N + 1] = curr_path[:]
final_path[N] = curr_path[0]
# Function to find the minimum edge cost
# having an end at the vertex i
def firstMin(adj, i):
min = maxsize
for k in range(N):
if adj[i][k] < min and i != k:
min = adj[i][k]
return min
# function to find the second minimum edge
# cost having an end at the vertex i
def secondMin(adj, i):
first, second = maxsize, maxsize
for j in range(N):
if i == j:
continue
if adj[i][j] <= first:
second = first
first = adj[i][j]
elif(adj[i][j] <= second and
adj[i][j] != first):
second = adj[i][j]
return second
# function that takes as arguments:
# curr_bound -> lower bound of the root node
# curr_weight-> stores the weight of the path so far
# level-> current level while moving
# in the search space tree
# curr_path[] -> where the solution is being stored
# which would later be copied to final_path[]
def TSPRec(adj, curr_bound, curr_weight,
level, curr_path, visited):
global final_res
# base case is when we have reached level N
# which means we have covered all the nodes once
if level == N:
# check if there is an edge from
# last vertex in path back to the first vertex
if adj[curr_path[level - 1]][curr_path[0]] != 0:
# curr_res has the total weight
# of the solution we got
curr_res = curr_weight + adj[curr_path[level - 1]]\
[curr_path[0]]
if curr_res < final_res:
copyToFinal(curr_path)
final_res = curr_res
return
# for any other level iterate for all vertices
# to build the search space tree recursively
for i in range(N):
# Consider next vertex if it is not same
# (diagonal entry in adjacency matrix and
# not visited already)
if (adj[curr_path[level-1]][i] != 0 and
visited[i] == False):
temp = curr_bound
curr_weight += adj[curr_path[level - 1]][i]
# different computation of curr_bound
# for level 2 from the other levels
if level == 1:
curr_bound -= ((firstMin(adj, curr_path[level - 1]) +
firstMin(adj, i)) / 2)
else:
curr_bound -= ((secondMin(adj, curr_path[level - 1]) +
firstMin(adj, i)) / 2)
# curr_bound + curr_weight is the actual lower bound
# for the node that we have arrived on.
# If current lower bound < final_res,
# we need to explore the node further
if curr_bound + curr_weight < final_res:
curr_path[level] = i
visited[i] = True
# call TSPRec for the next level
TSPRec(adj, curr_bound, curr_weight,
level + 1, curr_path, visited)
# Else we have to prune the node by resetting
# all changes to curr_weight and curr_bound
curr_weight -= adj[curr_path[level - 1]][i]
curr_bound = temp
# Also reset the visited array
visited = [False] * len(visited)
for j in range(level):
if curr_path[j] != -1:
visited[curr_path[j]] = True
# This function sets up final_path
def TSP(adj):
# Calculate initial lower bound for the root node
# using the formula 1/2 * (sum of first min +
# second min) for all edges. Also initialize the
# curr_path and visited array
curr_bound = 0
curr_path = [-1] * (N + 1)
visited = [False] * N
# Compute initial bound
for i in range(N):
curr_bound += (firstMin(adj, i) +
secondMin(adj, i))
# Rounding off the lower bound to an integer
curr_bound = math.ceil(curr_bound / 2)
# We start at vertex 1 so the first vertex
# in curr_path[] is 0
visited[0] = True
curr_path[0] = 0
# Call to TSPRec for curr_weight
# equal to 0 and level 1
TSPRec(adj, curr_bound, 0, 1, curr_path, visited)
# Driver code
# Adjacency matrix for the given graph
adj = [[0, 10, 15, 20],
[10, 0, 35, 25],
[15, 35, 0, 30],
[20, 25, 30, 0]]
N = 4
# final_path[] stores the final solution
# i.e. the // path of the salesman.
final_path = [None] * (N + 1)
# visited[] keeps track of the already
# visited nodes in a particular path
visited = [False] * N
# Stores the final minimum weight
# of shortest tour.
final_res = maxsize
TSP(adj)
print("Minimum cost :", final_res)
print("Path Taken : ", end = ' ')
for i in range(N + 1):
print(final_path[i], end = ' ')
# This code is contributed by ng24_7
Producción :
Minimum cost : 80 Path Taken : 0 1 3 2 0
Complejidad de tiempo: la complejidad del peor caso de Branch and Bound sigue siendo la misma que la de Brute Force claramente porque, en el peor de los casos, es posible que nunca tengamos la oportunidad de podar un Node. Mientras que, en la práctica, funciona muy bien según las diferentes instancias del TSP. La complejidad también depende de la elección de la función delimitadora, ya que son ellos los que deciden cuántos Nodes se van a podar.
Referencias:
http://lcm.csa.iisc.ernet.in/dsa/node187.html
Este artículo es una contribución de Anurag Rai . Si le gusta GeeksforGeeks y le gustaría contribuir, también puede escribir un artículo y enviarlo por correo a review-team@geeksforgeeks.org. Vea su artículo que aparece en la página principal de GeeksforGeeks y ayude a otros Geeks.
Escriba comentarios si encuentra algo incorrecto o si desea compartir más información sobre el tema tratado anteriormente.
Publicación traducida automáticamente
Artículo escrito por GeeksforGeeks-1 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA