Dado un gráfico ponderado no dirigido de N Nodes y M aristas en forma de tupla, digamos {X, Y, Z} tal que hay una arista con costo Z entre X e Y. Se supone que debemos calcular el costo mínimo de recorrido desde el Node 1 a N. Sin embargo, podemos realizar una operación antes del recorrido de modo que podamos reducir el costo de cualquier borde, digamos, C a C / 2 (división entera) .
Ejemplos:
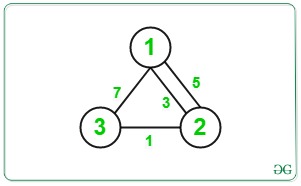
Entrada: N = 3, M = 4, Bordes = {{1, 2, 3}, {2, 3, 1}, {1, 3, 7}, {2, 1, 5}}
Salida: 2
Explicación:
El costo mínimo desde el Node de origen 1 hasta el Node de destino N es = 3/2 + 1 = 1 + 1 = 2.
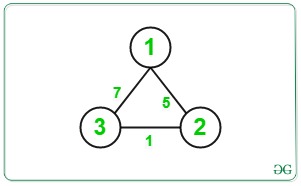
Entrada: N = 3, M = 3, Bordes = {{2, 3, 1}, {1, 3, 7}, {2, 1, 5}}
Salida: 2
Explicación:
El costo mínimo desde el Node de origen 1 hasta el Node de destino N es = 7/2 = 3.
Enfoque: La idea es considerar cada borde a modificar y tratar de minimizar el costo total al reducir su costo. La idea principal es dividir la ruta entre el Node 1 y N en la ruta desde 1 hasta cualquier vértice u , es decir, ruta (1 a u) y desde el Node N a cualquier vértice v , es decir, ruta (n a v) para todo u y v tales que u a v forman una arista . Podemos calcular fácilmente la distancia desde cualquier Node, digamos, fuente a todos los demás Nodes en el gráfico aplicando el algoritmo de ruta más corta de fuente única, algoritmo de Dijkstra. En este problema estaríamos aplicando elAlgoritmo de Dijkstra dos veces eligiendo fuentes como 1 y N por separado y almacenando el costo para llegar a cada Node en la array dist_from_source[] y dist_from_dest[] respectivamente.
Después de haber calculado estas dos arrays, podemos calcular fácilmente el costo asociado después de modificar cada borde. Consideremos una arista de u a v y dejemos que el costo asociado sea c. Si intentamos modificar este borde, podemos calcular el costo mínimo de 1 a N como dist_from_source[u] + dist_from_dest[v] + c/2 . Haciendo esto para todos los bordes y minimizándolo, podemos obtener el costo mínimo para viajar desde la fuente 1 hasta el destino N.
- Realice un algoritmo de Dijkstra para encontrar la ruta más corta de fuente única para todos los vértices desde el Node 1 y guárdelo en una array como dist_from_source[] .
- Realice un algoritmo de Dijkstra para encontrar la ruta más corta de fuente única para todos los vértices desde el Node N y guárdelo en una array como dist_from_dest[] .
- Declare una variable minCost y asígnela a un número muy grande inicialmente.
- Atraviese todos los bordes dados [u, v, c] y redúzcalos como la fórmula discutida anteriormente y actualice la variable minCost como:
minCost = min(minCost, dist_from_source[u] + c/2 + dist_from_dest[v])
donde,
c es el costo del borde actual,
dist_from_source[u] es el costo de la ruta desde el Node 1 hasta u
dist_from_source[v] es el costo de camino del Node N a v
- Repita este proceso para todos los bordes y actualice correspondientemente la variable minCost .
- Imprime el valor de minCost después del paso anterior.
A continuación se muestra la implementación del enfoque anterior:
C++14
// C++ program for the above approach
#include <bits/stdc++.h>
using namespace std;
#define INF 1e9
// Function for Dijkstra Algorithm to
// find single source shortest path
void dijkstra(int source, int n,
vector<pair<int,
int> >
adj[],
vector<int>& dist)
{
// Resize dist[] to N and assign
// any large value to it
dist.resize(n, INF);
// Initialise distance of source
// node as 0
dist = 0;
// Using min-heap priority_queue
// for sorting wrt edges_cost
priority_queue<pair<int, int>,
vector<pair<int,
int> >,
greater<pair<int,
int> > >
pq;
// Push the current dist
// and source to pq
pq.push({ dist, source });
// Until priority queue is empty
while (!pq.empty()) {
// Store the cost of linked
// node to edges
int u = pq.top().second;
// int d = pq.top().first;
// Pop the top node
pq.pop();
// Iterate over edges
for (auto& edge : adj[u]) {
// Find the starting and
// ending vertex of edge
int v = edge.first;
int w = edge.second;
// Update the distance of
// node v to minimum of
// dist[u] + w if it is
// minimum
if (dist[u] + w < dist[v]) {
dist[v] = dist[u] + w;
pq.push({ dist[v], v });
}
}
}
}
// Function to find the minimum cost
// between node 1 to node n
void minCostPath(
vector<pair<int, pair<int, int> > >& edges,
int n, int M)
{
// To create Adjacency List
vector<pair<int, int> > adj[100005];
// Iterate over edges
for (int i = 0; i < M; i++) {
// Get source, destination and
// edges of edges[i]
int x = edges[i].first;
int y = edges[i].second.first;
int z = edges[i].second.second;
// Create Adjacency List
adj[x].push_back({ y, z });
adj[y].push_back({ x, z });
}
// To store the cost from node 1
// and node N
vector<int> dist_from_source;
vector<int> dist_from_dest;
// Find the cost of travel between
// source(1) to any vertex
dijkstra(1, n + 1, adj, dist_from_source);
// Find the cost of travel between
// destination(n) to any vertex
dijkstra(n, n + 1, adj, dist_from_dest);
// Initialise the minimum cost
int min_cost = dist_from_source[n];
// Traverse the edges
for (auto& it : edges) {
// Get the edges
int u = it.first;
int v = it.second.first;
int c = it.second.second;
// Find the current cost from
// node 1 to u and node u to v
// and node v to N with only
// current edge cost reduced
// to half
int cur_cost = dist_from_source[u]
+ c / 2
+ dist_from_dest[v];
// Update the min_cost
min_cost = min(min_cost, cur_cost);
}
// Print the minimum cost
cout << min_cost << '\n';
}
// Driver Code
int main()
{
// Give Nodes and Edges
int N = 3;
int M = 3;
// Given Edges with cost
vector<pair<int, pair<int, int> > > edges;
edges.push_back({ 2, { 3, 1 } });
edges.push_back({ 1, { 3, 7 } });
edges.push_back({ 2, { 1, 5 } });
// Function Call
minCostPath(edges, N, M);
return 0;
}
Javascript
<script>
// Javascript program for the above approach
// Function for Dijkstra Algorithm to
// find single source shortest path
function dijkstra(source, n, adj, dist)
{
// Resize dist[] to N and assign
// any large value to it
dist = Array(n).fill(1000000000);
// Initialise distance of source
// node as 0
dist = 0;
// Using min-heap priority_queue
// for sorting wrt edges_cost
var pq = [];
// Push the current dist
// and source to pq
pq.push([dist, source]);
// Until priority queue is empty
while (pq.length!=0) {
// Store the cost of linked
// node to edges
var u = pq[pq.length-1][1];
// int d = pq.top()[0];
// Pop the top node
pq.pop();
// Iterate over edges
for (var edge of adj[u]) {
// Find the starting and
// ending vertex of edge
var v = edge[0];
var w = edge[1];
// Update the distance of
// node v to minimum of
// dist[u] + w if it is
// minimum
if (dist[u] + w < dist[v]) {
dist[v] = dist[u] + w;
pq.push([dist[v], v ]);
}
}
pq.sort();
}
return dist;
}
// Function to find the minimum cost
// between node 1 to node n
function minCostPath(edges, n, M)
{
// To create Adjacency List
var adj = Array.from(Array(100005), ()=>new Array());
// Iterate over edges
for (var i = 0; i < M; i++) {
// Get source, destination and
// edges of edges[i]
var x = edges[i][0];
var y = edges[i][1][0];
var z = edges[i][1][1];
// Create Adjacency List
adj[x].push([y, z ]);
adj[y].push([x, z ]);
}
// To store the cost from node 1
// and node N
var dist_from_source = [];
var dist_from_dest = [];
// Find the cost of travel between
// source(1) to any vertex
dist_from_source = dijkstra(1, n + 1, adj, dist_from_source);
// Find the cost of travel between
// destination(n) to any vertex
dist_from_dest = dijkstra(n, n + 1, adj, dist_from_dest);
// Initialise the minimum cost
var min_cost = dist_from_source[n];
// Traverse the edges
for (var it of edges) {
// Get the edges
var u = it[0];
var v = it[1][0];
var c = it[1][1];
// Find the current cost from
// node 1 to u and node u to v
// and node v to N with only
// current edge cost reduced
// to half
var cur_cost = dist_from_source[u]
+ parseInt(c / 2)
+ dist_from_dest[v];
// Update the min_cost
min_cost = Math.min(min_cost, cur_cost);
}
// Print the minimum cost
document.write( min_cost + "<br>");
}
// Driver Code
// Give Nodes and Edges
var N = 3;
var M = 3;
// Given Edges with cost
var edges = [];
edges.push([2, [3, 1]]);
edges.push([1, [3, 7 ]]);
edges.push([2, [1, 5 ]]);
// Function Call
minCostPath(edges, N, M);
// This code is contributed by noob2000.
</script>
Python3
# Python3 program for the above approach import heapq as hq INF = 1e9 # Function for Dijkstra Algorithm to # find single source shortest path def dijkstra(source, n, adj, dist): # Initialise distance of source # node as 0 dist = 0 # Using min-heap priority_queue # for sorting wrt edges_cost pq = [] # Push the current dist # and source to pq hq.heappush(pq, (dist, source)) # Until priority queue is empty while pq: # Store the cost of linked # node to edges d, u = hq.heappop(pq) # Iterate over edges for v,w in adj[u]: # Update the distance of # node v to minimum of # dist[u] + w if it is # minimum if dist[u] + w < dist[v]: dist[v] = dist[u] + w hq.heappush(pq, (dist[v], v)) # Function to find the minimum cost # between node 1 to node n def minCostPath(edges, n, M): # To create Adjacency List adj = [[]for _ in range(100005)] # Iterate over edges for i in range(M): # Get source, destination and # edges of edges[i] x = edges[i][0] y = edges[i][1][0] z = edges[i][1][1] # Create Adjacency List adj[x].append((y, z)) adj[y].append((x, z)) # To store the cost from node 1 # and node N dist_from_source = [INF] * (n+1) dist_from_dest = [INF] * (n+1) # Find the cost of travel between # source(1) to any vertex dijkstra(1, n + 1, adj, dist_from_source) # Find the cost of travel between # destination(n) to any vertex dijkstra(n, n + 1, adj, dist_from_dest) # Initialise the minimum cost min_cost = dist_from_source[n] # Traverse the edges for it in edges: # Get the edges u = it[0] v = it[1][0] c = it[1][1] # Find the current cost from # node 1 to u and node u to v # and node v to N with only # current edge cost reduced # to half cur_cost = dist_from_source[u] + c // 2 + dist_from_dest[v] # Update the min_cost min_cost = min(min_cost, cur_cost) # Print minimum cost print(min_cost) # Driver Code if __name__ == "__main__": # Give Nodes and Edges N = 3 M = 3 # Given Edges with cost edges = [] edges.append((2, (3, 1))) edges.append((1, (3, 7))) edges.append((2, (1, 5))) # Function Call minCostPath(edges, N, M)
3
Complejidad temporal: O(M log N), donde N es el número de Nodes y M es el número de aristas.
Espacio Auxiliar: O(N), donde N es el número de Nodes.
Publicación traducida automáticamente
Artículo escrito por sameeralamynwa y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA