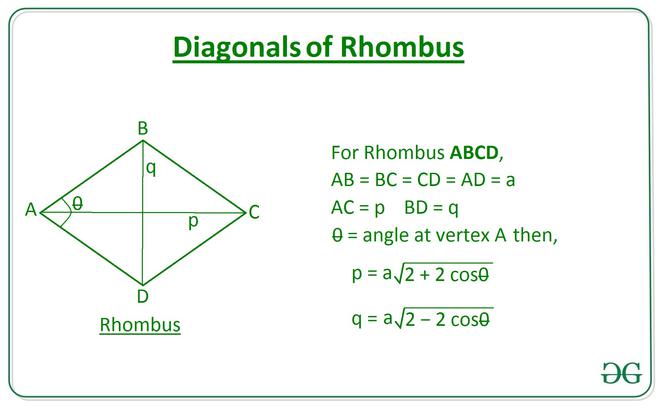
Dados dos números enteros A y theta , que denotan la longitud de un lado de un rombo y el ángulo del vértice respectivamente, la tarea es encontrar la longitud de las diagonales del rombo.
Ejemplos:
Entrada: A = 10, theta = 30
Salida: 19,32 5,18Entrada: A = 6, theta = 45
Salida: 11,09 4,59
Planteamiento:
El problema se puede resolver usando la ley de los cosenos . Usando la ley de los cosenos en los triángulos formados por las diagonales y los lados del rombo se obtiene la siguiente relación para calcular la longitud de las diagonales:


A continuación se muestra la implementación del enfoque anterior:
C++
// C++ program to implement
// the above approach
#include <bits/stdc++.h>
using namespace std;
// Function to calculate the length
// of diagonals of a rhombus using
// length of sides and vertex angle
double Length_Diagonals(int a, double theta)
{
double p = a * sqrt(2 + (2 * cos(
theta * (3.141 / 180))));
double q = a * sqrt(2 - (2 * cos(
theta * (3.141 / 180))));
cout << fixed << setprecision(2) << p
<< " " << q;
}
// Driver Code
int main()
{
int a = 6;
int theta = 45;
// Function Call
Length_Diagonals(a, theta);
return 0;
}
// This code is contributed by Virusbuddah_
Java
// Java program to implement
// the above approach
class GFG{
// Function to calculate the length
// of diagonals of a rhombus using
// length of sides and vertex angle
static double[] Length_Diagonals(int a, double theta)
{
double p = a * Math.sqrt(2 + (2 *
Math.cos(theta * (Math.PI / 180))));
double q = a * Math.sqrt(2 - (2 *
Math.cos(theta * (Math.PI / 180))));
return new double[]{ p, q };
}
// Driver Code
public static void main(String[] args)
{
int A = 6;
double theta = 45;
double[] ans = Length_Diagonals(A, theta);
System.out.printf("%.2f" + " " + "%.2f",
ans[0], ans[1]);
}
}
// This code is contributed by Princi Singh
Python3
# Python Program to implement # the above approach import math # Function to calculate the length # of diagonals of a rhombus using # length of sides and vertex angle def Length_Diagonals(a, theta): p = a * math.sqrt(2 + (2 * \ math.cos(math.radians(theta)))) q = a * math.sqrt(2 - (2 * \ math.cos(math.radians(theta)))) return [p, q] # Driver Code A = 6 theta = 45 ans = Length_Diagonals(A, theta) print(round(ans[0], 2), round(ans[1], 2))
C#
// C# program to implement
// the above approach
using System;
class GFG{
// Function to calculate the length
// of diagonals of a rhombus using
// length of sides and vertex angle
static double[] Length_Diagonals(int a, double theta)
{
double p = a * Math.Sqrt(2 + (2 *
Math.Cos(theta * (Math.PI / 180))));
double q = a * Math.Sqrt(2 - (2 *
Math.Cos(theta * (Math.PI / 180))));
return new double[]{ p, q };
}
// Driver Code
public static void Main(String[] args)
{
int A = 6;
double theta = 45;
double[] ans = Length_Diagonals(A, theta);
Console.Write("{0:F2}" + " " + "{1:F2}",
ans[0], ans[1]);
}
}
// This code is contributed by gauravrajput1
Javascript
<script>
// JavaScript program for the above approach
// Function to calculate the length
// of diagonals of a rhombus using
// length of sides and vertex angle
function Length_Diagonals(a, theta)
{
let p = a * Math.sqrt(2 + (2 *
Math.cos(theta * (Math.PI / 180))));
let q = a * Math.sqrt(2 - (2 *
Math.cos(theta * (Math.PI / 180))));
return [ p, q ];
}
// Driver Code
let A = 6;
let theta = 45;
let ans = Length_Diagonals(A, theta);
document.write(ans[0].toFixed(2) + " "
+ ans[1].toFixed(2));
</script>
11.09 4.59
Tiempo Complejidad: O(1)
Espacio Auxiliar: O(1)
Publicación traducida automáticamente
Artículo escrito por divyamohan123 y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA