Visión general :
- En la eliminación de taxonomía de algoritmos de superficie oculta, el objeto resultante se puede representar como una colección de líneas de contorno, por ejemplo, la técnica de apelación o de Watkins, o el método de prioridad de Encarnacao requiere que se ingresen datos como triángulos, y calcula cada parte del dibujo a su vez, desde el frente . de superficie
- En una representación por computadora, las cosas sólidas generalmente se representan en poliedros. La unión de n intervalos ocultos debe definirse sobre la cara de un método de línea oculta Spring to A. Call. Una llamada. La tesis de Patrick Gilles Maillot es una expansión de la técnica de dibujo de líneas de Bresenham con eliminación de líneas ocultas en 3D.
- El sistema de eliminación de líneas ocultas presenta un enfoque computacionalmente rápido. Se maneja la situación de objetos con caras curvas en lugar de polígonos. La técnica organiza líneas curvas espacialmente en muchas celdas de cuadrícula cuadrada que dividen el plano de dibujo para disminuir la cantidad de cálculos geométricos complicados para los cruces de líneas. Las líneas ocultas se dividen en dos categorías en un algoritmo y se procesan en varios pasos. En promedio, el algoritmo alcanza tiempos casi lineales.
- La eliminación de líneas ocultas se utiliza para determinar qué líneas no deben dibujarse en una imagen tridimensional. Esto siempre ha sido de interés. El objetivo principal de la eliminación de líneas ocultas es identificar si una superficie limitada se encuentra entre el punto de vista y la línea o el punto que se va a dibujar y si el punto o parte de la línea es invisible y no se dibuja.
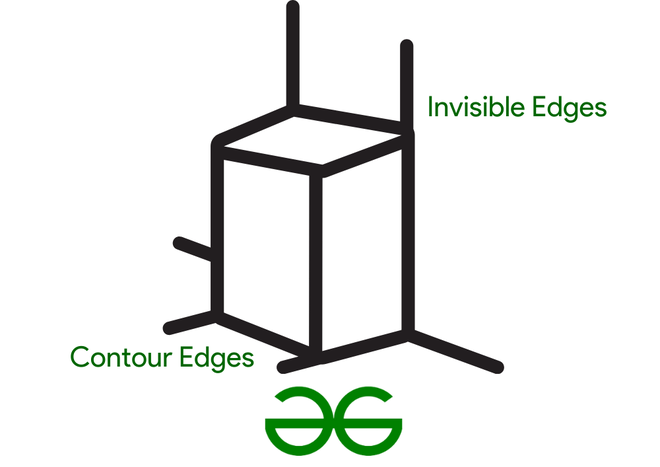
Figura 1. Comprender la línea oculta de Appel
- La técnica proporcionada permite eliminar las líneas ocultas de una vista de objetos cóncavos y convexos que miran al plano en el plano de la imagen. Todas las esquinas y todos los planos que oscurecen cada punto del borde se evalúan consecutivamente.
Las fronteras :
- A medida que el número de bordes se cuadra, el tiempo de computadora crece aproximadamente. Un número reducido de puntos cóncavos utiliza un algoritmo y detecta automáticamente solo un elemento sin puntos cóncavos. En el último caso, es considerablemente más simple obtener el resultado.
- Línea oculta La mayoría de los algoritmos de superficie se pueden usar para eliminar la línea oculta si el contorno de un elemento se muestra comparable a recortar un segmento de línea contra una ventana. La eliminación de la línea oculta implica que los objetos son líneas modeladas. Se producen líneas donde se intersecan las superficies.
- El trabajo de Giloi contiene una clasificación de datos de entrada basada en la forma y da ejemplos de métodos. Esta categorización (de cuatro grupos a tres) se ha simplificado ligeramente y se han identificado algoritmos. No está completo, algunos algoritmos no están clasificados en estas categorías y también hay enfoques alternativos disponibles para clasificar estos algoritmos.
- Métodos y métodos como el trazado de rayos y la radiosidad por un lado y el mapeo de texturas y modelos de sombreado avanzados por otro permitieron la producción de imágenes sintéticas fotorrealistas.
Comprender el uso de FORTRAN:
Hay muchos métodos de programación disponibles que son adecuados para líneas con halo. El mejor código debe tener en cuenta la pantalla, el idioma deseado del programa, el espacio de almacenamiento disponible y los medios de almacenamiento de datos apropiados. El proceso que hemos creado es bueno, implementado en FORTRAN, con fotos en diferentes tamaños de almacenamiento, plotters de impresora y un compositor de fotos trabajando en una computadora VM/168.
- Formas convexidad
- Las pruebas para líneas ocultas suelen ser buenas:
- Eliminación de caras ciertamente fuera de la vista
- Pero: problema de formas no convexas
Nota:
si el formulario contiene numerosas complicaciones geométricas, la prueba podría fallar.
Prueba de convexidad bruta:
dibuje líneas rectas entre los puntos internos geométricos, ¿permanecen en el polígono?
- Determine qué líneas o superficies de los elementos deben mostrarse, dado un conjunto de objetos 3D y un requisito de visualización.
- Otros elementos o el mismo objeto pueden ocluir una superficie (autooclusión)
- La duración de los cálculos se asocia principalmente con la complejidad visual de la imagen final, pero dependiendo del entorno particular que se muestre, puede variar de una conexión lineal a una exponencial con respecto al número de polígonos de entrada.
- La ejecución utiliza un preprocesador de área de pantalla para construir múltiples ventanas, cada una con una cierta cantidad de polígonos, para evitar tiempo de cálculo innecesario.
- Cada una de las ventanas está cubierta de forma independiente por el método de superficie oculta.
- Esta estrategia elimina los problemas al dividir el nivel de resolución de la pantalla por zona de la pantalla al mismo tiempo que conserva los beneficios del método de clasificación por polígonos.
Publicación traducida automáticamente
Artículo escrito por icloudanshu y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA