Introducción
El automóvil de conducción autónoma es una de las innovaciones más disruptivas en IA. Impulsados por algoritmos de aprendizaje profundo, impulsan continuamente a nuestra sociedad y crean nuevas oportunidades en el sector de la movilidad. Un automóvil autónomo puede ir a cualquier lugar al que pueda ir un automóvil tradicional y hace todo lo que hace un conductor humano experimentado. Pero es muy esencial entrenarlo adecuadamente. Uno de los muchos pasos involucrados durante el entrenamiento de un automóvil de conducción autónoma es la detección de carril, que es el paso preliminar. Hoy, vamos a aprender cómo realizar la detección de carril usando videos.
La detección de carril implica los siguientes pasos:
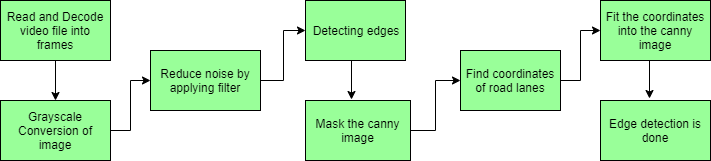
- Capturar y decodificar un archivo de video: capturaremos el video usando el objeto VideoCapture y, una vez inicializada la captura, se decodificará cada cuadro de video (es decir, se convertirá en una secuencia de imágenes).
- Conversión de imagen en escala de grises: los cuadros de video están en formato RGB, RGB se convierte a escala de grises porque el procesamiento de una imagen de un solo canal es más rápido que el procesamiento de una imagen en color de tres canales.
- Reducir el ruido: el ruido puede crear bordes falsos, por lo tanto, antes de continuar, es imprescindible realizar un suavizado de la imagen. El filtro gaussiano se utiliza para realizar este proceso.
- Canny Edge Detector: calcula el gradiente en todas las direcciones de nuestra imagen borrosa y rastrea los bordes con grandes cambios de intensidad. Para obtener más explicaciones, consulte este artículo: Canny Edge Detector
- Región de interés: este paso es para tener en cuenta solo la región cubierta por el carril de la carretera. Aquí se crea una máscara, que tiene la misma dimensión que nuestra imagen de carretera. Además, la operación AND bit a bit se realiza entre cada píxel de nuestra imagen canny y esta máscara. En última instancia, enmascara la imagen astuta y muestra la región de interés trazada por el contorno poligonal de la máscara.
- Transformación de línea de Hough: la transformación de línea de Hough es una transformación utilizada para detectar líneas rectas. Aquí se utiliza la transformada de línea probabilística de Hough, que da como resultado los extremos de las líneas detectadas.
Conjunto de datos: el conjunto de datos consiste en el archivo de video de una carretera.
Puede descargar el conjunto de datos desde este enlace de GitHub – Conjunto de datos
Ahora, comencemos el proceso de implementación:
- NumPy: Viene por defecto con anaconda
- Matplotlib: para instalar matplotlib, escriba – «pip install matplotlib» en su línea de comando
- OpenCV: Se puede instalar de dos formas, usando anaconda o usando pip.
Para instalar usando anaconda, escriba «conda install -c conda-forge opencv», o para instalar usando pip, escriba
«pip install opencv-python» en su línea de comando
Publicación traducida automáticamente
Artículo escrito por Dolly_Vaishnav y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA