Dado un grafo no dirigido G , la tarea es encontrar el camino más corto de longitud par, dado 1 como Node de origen y N como Node de destino. La longitud de la ruta se refiere al número de aristas presentes en una ruta (no al costo de la ruta).
Ejemplos:
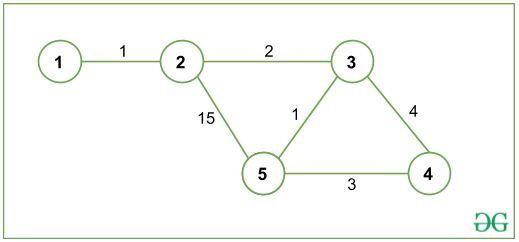
Entrada: N = 5, G se da a continuación:
Salida: 10
Explicación:
Todas las rutas desde 1 (Node de origen) hasta 5 (Node de destino) son:
1->2->5
Costo: 16 Longitud: 2 (par)
1->2->3->5
Costo: 4 Longitud: 3(impar)
1->2->3->4->5
Costo: 10 Longitud: 4(par)
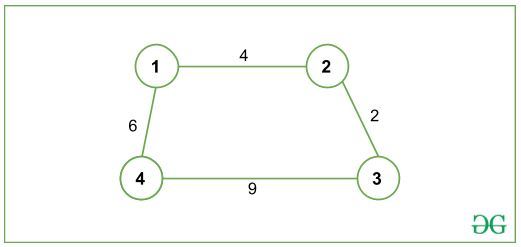
El camino más corto es 1->2->3->5 con costo total 4, pero tiene un camino de longitud impar y dado que solo nos interesan los caminos de longitud par, el camino más corto con longitud par es 1->2->3->4->5, con un costo total de 10.Entrada 2: N = 4, G se da a continuación:
Salida: -1
Explicación:
No hay una ruta de longitud uniforme desde 1 (Node de origen) a 4 (Node de destino).
Enfoque:
Cree un nuevo gráfico ( G’ ). Para cada Node V en el gráfico inicial G , cree dos nuevos Nodes V_par y V_odd .
Aquí, V_impar se representará como ((V * 10) + 1) y V_par como ((V * 10) + 2).
Por ejemplo, si el Node V = 4, entonces V_impar = 41 y V_par = 42.
Ahora, para cada arista ( U, V ) en G , agregue dos nuevas aristas en G’ , (U_par, V_odd) y (U_odd, V_par) . Finalmente, encuentre la ruta más corta desde el Node (source_even) hasta el Node (destination_even) utilizando el algoritmo de ruta más corta de Dijkstra .
Para el Gráfico dado en la Entrada 1 (arriba), G’ se puede representar como:
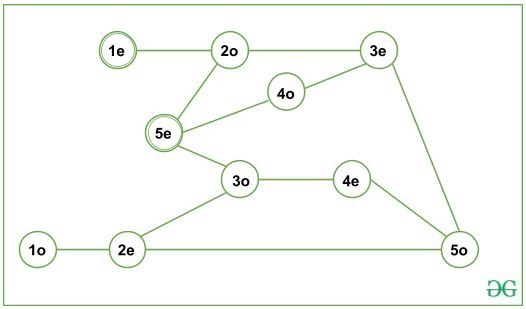
Se puede observar en el gráfico G’ que solo hay caminos de longitud par desde (1_par) a (5_par) . Por lo tanto, los caminos de longitud impar se separan en G’ y se puede obtener el camino más corto requerido.
A continuación se muestra la implementación del enfoque anterior:
C++
// C++ program for the above approach
#include <bits/stdc++.h>
using namespace std;
const int MAXX = 10000, INF = 1e9;
// Adjacency List: to represent graph
vector<vector<pair<int, int> > >
adj(MAXX * 10 + 3);
// Distance Array: to store shortest
// distance to every node
vector<int> dist(MAXX * 10 + 3, INF);
// returns value which will
// represent even_x
int even(int x)
{
return x * 10 + 2;
}
// returns value which will
// represent odd_x
int odd(int x)
{
return x * 10 + 1;
}
// converting edge (a->b) to 2
// different edges i.e. (a->b)
// converts to (1). even_a -> odd_b
// (2). odd_a -> even_b
// since, graph is undirected, so we
// push them in reverse order too
// hence, 4 push_back operations are
// there.
void addEdge(int a, int b, int cost)
{
adj[even(a)].push_back(
{ odd(b), cost });
adj[odd(a)].push_back(
{ even(b), cost });
adj[odd(b)].push_back(
{ even(a), cost });
adj[even(b)].push_back(
{ odd(a), cost });
}
// Function calculates shortest
// distance to all nodes from
// "source" using Dijkstra
// Shortest Path Algorithm
// and returns shortest distance
// to "destination"
int dijkstra(int source,
int destination)
{
/* Priority Queue/min-heap
to store and process
(distance, node) */
priority_queue<pair<int, int>,
vector<pair<int, int> >,
greater<pair<int, int> > >
pq;
// pushing source node to
// priority queue and dist from
// source to source is set to 0
pq.push({ 0, even(source) });
dist[even(source)] = 0;
while (!pq.empty()) {
// U is the node at top
// of the priority queue
// note that pq.top().first
// refers to the Distance
// and pq.top().second
// will refer to the Node
int u = pq.top().second;
pq.pop();
// exploring all neighbours
// of node u
for (pair<int, int> p :
adj[u]) {
/* v is neighbour node of u
and c is the cost/weight
of edge (u, v) */
int v = p.first;
int c = p.second;
// relaxation: checking if there
// is a shorter path to v via u
if (dist[u] + c
< dist[v]) {
// updating distance of v
dist[v] = dist[u] + c;
pq.push({ dist[v], v });
}
}
}
// returning shortest
// distance to "destination"
return dist[even(destination)];
}
// Driver function
int main()
{
// n = number of Nodes,
// m = number of Edges
int n = 5, m = 6;
addEdge(1, 2, 1);
addEdge(2, 3, 2);
addEdge(2, 5, 15);
addEdge(3, 5, 1);
addEdge(3, 4, 4);
addEdge(5, 4, 3);
int source = 1;
int destination = n;
int ans = dijkstra(source, destination);
// if ans is INF: There is no
// even length path from source
// to destination else path
// exists and we print the
// shortest distance
if (ans == INF)
cout << "-1"
<< "\n";
else
cout << ans << "\n";
return 0;
}
Java
// Java program for the above approach
import java.util.ArrayList;
import java.util.Arrays;
import java.util.PriorityQueue;
class GFG{
static class Pair implements Comparable<Pair>
{
int first, second;
public Pair(int first, int second)
{
this.first = first;
this.second = second;
}
@Override
public int compareTo(GFG.Pair o)
{
if (this.first == o.first)
{
return this.second - o.second;
}
return this.first - o.first;
}
}
static final int MAXX = 10000, INF = (int)1e9;
// Adjacency List: to represent graph
@SuppressWarnings("unchecked")
static ArrayList<Pair>[] adj = new ArrayList[MAXX * 10 + 3];
// Distance Array: to store shortest
// distance to every node
static int[] dist = new int[MAXX * 10 + 3];
// Returns value which will
// represent even_x
static int even(int x)
{
return x * 10 + 2;
}
// Returns value which will
// represent odd_x
static int odd(int x)
{
return x * 10 + 1;
}
// Converting edge (a->b) to 2
// different edges i.e. (a->b)
// converts to (1). even_a -> odd_b
// (2). odd_a -> even_b
// since, graph is undirected, so we
// push them in reverse order too
// hence, 4 push_back operations are
// there.
static void addEdge(int a, int b, int cost)
{
adj[even(a)].add(new Pair(odd(b), cost));
adj[odd(a)].add(new Pair(even(b), cost));
adj[odd(b)].add(new Pair(even(a), cost));
adj[even(b)].add(new Pair(odd(a), cost));
}
// Function calculates shortest
// distance to all nodes from
// "source" using Dijkstra
// Shortest Path Algorithm
// and returns shortest distance
// to "destination"
static int dijkstra(int source, int destination)
{
// Priority Queue/min-heap to store
// and process (distance, node)
PriorityQueue<Pair> pq = new PriorityQueue<>();
// Pushing source node to
// priority queue and dist from
// source to source is set to 0
pq.add(new Pair(0, even(source)));
dist[even(source)] = 0;
while (!pq.isEmpty())
{
// U is the node at top
// of the priority queue
// note that pq.top().first
// refers to the Distance
// and pq.top().second
// will refer to the Node
int u = pq.poll().second;
// Exploring all neighbours
// of node u
for(Pair p : adj[u])
{
// v is neighbour node of u and
// c is the cost/weight of edge (u, v)
int v = p.first;
int c = p.second;
// Relaxation: checking if there
// is a shorter path to v via u
if (dist[u] + c < dist[v])
{
// Updating distance of v
dist[v] = dist[u] + c;
pq.add(new Pair(dist[v], v));
}
}
}
// Returning shortest
// distance to "destination"
return dist[even(destination)];
}
// Driver code
public static void main(String[] args)
{
for(int i = 0; i < MAXX * 10 + 3; i++)
{
adj[i] = new ArrayList<Pair>();
}
Arrays.fill(dist, INF);
// n = number of Nodes,
// m = number of Edges
int n = 5, m = 6;
addEdge(1, 2, 1);
addEdge(2, 3, 2);
addEdge(2, 5, 15);
addEdge(3, 5, 1);
addEdge(3, 4, 4);
addEdge(5, 4, 3);
int source = 1;
int destination = n;
int ans = dijkstra(source, destination);
// If ans is INF: There is no
// even length path from source
// to destination else path
// exists and we print the
// shortest distance
if (ans == INF)
System.out.println("-1");
else
System.out.println(ans);
}
}
// This code is contributed by sanjeev2552
Python3
# Python3 program for the above approach import heapq as hq MAXX = 10000 INF = 1e9 # Adjacency List: to represent graph adj = [[] for _ in range(MAXX * 10 + 3)] # Distance Array: to store shortest # distance to every node dist = [INF] * (MAXX * 10 + 3) # returns value which will # represent even_x def even(x): return x * 10 + 2 # returns value which will # represent odd_x def odd(x): return x * 10 + 1 # converting edge (a->b) to 2 # different edges i.e. (a->b) # converts to (1). even_a -> odd_b # (2). odd_a -> even_b # since, graph is undirected, so we # push them in reverse order too # hence, 4 append operations are # there. def addEdge(a, b, cost): adj[even(a)].append((odd(b), cost)) adj[odd(a)].append((even(b), cost)) adj[odd(b)].append((even(a), cost)) adj[even(b)].append((odd(a), cost)) # Function calculates shortest # distance to all nodes from # "source" using Dijkstra # Shortest Path Algorithm # and returns shortest distance # to "destination" def dijkstra(source, destination): # Priority Queue/min-heap # to store and process # (distance, node) pq = [] # pushing source node to # priority queue and dist from # source to source is set to 0 hq.heappush(pq, (0, even(source))) dist[even(source)] = 0 while pq: # U is the node at top # of the priority queue # note that pq.top()[1] # refers to the Distance # and pq.top()[1] # will refer to the Node u = hq.heappop(pq)[1] # exploring all neighbours # of node u # v is neighbour node of u # and c is the cost/weight # of edge (u, v) for v, c in adj[u]: # relaxation: checking if there # is a shorter path to v via u if dist[u] + c < dist[v]: # updating distance of v dist[v] = dist[u] + c hq.heappush(pq, (dist[v], v)) # returning shortest # distance to "destination" return dist[even(destination)] # Driver function if __name__ == "__main__": # n = number of Nodes, # m = number of Edges n = 5 m = 6 addEdge(1, 2, 1) addEdge(2, 3, 2) addEdge(2, 5, 15) addEdge(3, 5, 1) addEdge(3, 4, 4) addEdge(5, 4, 3) source = 1 destination = n ans = dijkstra(source, destination) # if ans is INF: There is no # even length path from source # to destination else path # exists and we print # shortest distance if ans == INF: print(-1) else: print(ans)
10
Complejidad de Tiempo: (E * log(V))
Espacio Auxiliar: O(V + E)