Introducción:
El control de lógica difusa (FLC) es el área de investigación más activa en la aplicación de la teoría de conjuntos borrosos, el razonamiento borroso y la lógica difusa. La aplicación de FLC se extiende desde el control de procesos industriales hasta la instrumentación y los valores biomédicos. En comparación con las técnicas de control convencionales, FLC se ha utilizado mejor en problemas complejos mal definidos, que pueden ser controlados por un operador humano eficiente sin conocimiento de su dinámica subyacente.
Un sistema de control es una disposición de componentes físicos diseñados para alterar otro sistema físico de modo que este sistema exhiba ciertas características deseadas. Existen dos tipos de sistemas de control: sistemas de control de lazo abierto y de lazo cerrado. En los sistemas de control de lazo abierto, la acción de control de entrada es independiente de la salida del sistema físico. Por otro lado, en un sistema de control de lazo cerrado, la acción de control de entrada depende de la salida del sistema físico. Los sistemas de control de aro cerrado también se conocen como sistemas de control de retroalimentación. El primer paso para controlar cualquier variable física es medirla. Un sensor mide la señal controlada. Una planta es un sistema físico bajo control. En un sistema de control de lazo cerrado, las señales forzadas de las entradas del sistema están determinadas por las respuestas de salida del sistema.
La salida del sistema físico bajo control se ajusta con la ayuda de una señal de error. La diferencia entre la respuesta real (calculada) de la planta y la respuesta deseada da la señal de error. Para obtener respuestas y características satisfactorias para el sistema de control de lazo cerrado, se puede agregar al lazo un sistema adicional, llamado compensador o controlador. El diagrama de bloques básico del sistema de control de bucle cerrado se muestra en la Figura 1. Las reglas de control difuso son básicamente reglas IE-THEN.
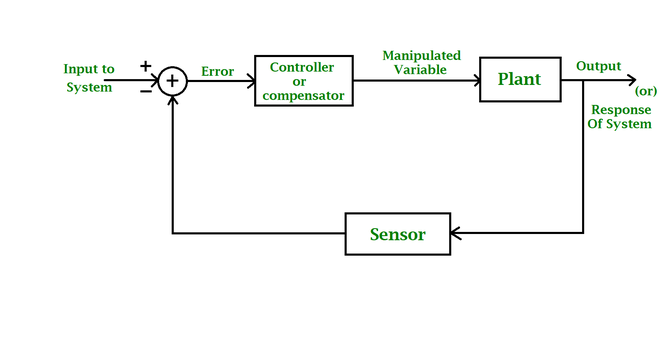
Fig. 1: Diagrama de bloques del sistema de control de circuito cerrado
Diseño del sistema de control:
El diseño de un controlador para un sistema físico complejo implica los siguientes pasos:
- Descomponer el sistema a gran escala en una colección de varios subsistemas.
- Variar la dinámica de la planta lentamente y linealizar la dinámica del plano no lineal sobre un conjunto de puntos de operación.
- Organizar un conjunto de variables de estado, variables de control o características de salida para el sistema bajo consideración.
- 4. Diseño de controladores simples P, PD, PID para los subsistemas. También se pueden diseñar controladores óptimos.
Aparte de los primeros cuatro pasos, pueden surgir incertidumbres debido a las condiciones ambientales externas. El diseño del controlador debe hacerse lo más cercano posible al diseño óptimo del controlador basado en el conocimiento experto del ingeniero de control. Esto puede hacerse mediante varias observaciones numéricas de la relación entrada-salida en forma de información lingüística, intuitiva y de otro tipo relacionada con la dinámica de la planta y el entorno externo. Finalmente, un sistema de control de supervisión, ya sea con operador manual o automático, forma un circuito de control de retroalimentación adicional para sintonizar y ajustar los parámetros del controlador, para compensar los efectos variacionales causados por la dinámica remodelada y no lineal. En comparación con un diseño de sistema de control convencional, el diseño de un sistema FLC debe tener las siguientes suposiciones, en caso de que se seleccione. La planta bajo consideración debe ser observable y controlable. Una amplia gama de conocimientos que comprenda un conjunto de reglas lingüísticas expertas, el sentido común básico de la ingeniería, un conjunto de datos para entrada/salida o un modelo analítico de controlador, que puede ser difuso y a partir del cual se puede formar la regla difusa que es la base. existir. Además, para el problema en consideración, debe existir una solución y debe ser tal que el control del ingeniero esté trabajando para una «buena» solución y no especialmente buscando una solución óptima. El controlador, en este caso, debe diseñarse lo mejor que podamos y dentro de un rango aceptable de precisión. Cabe señalar que los problemas de estabilidad y optimización son problemas constantes en el diseño de controladores difusos.
En el diseño de un controlador de lógica difusa, el proceso de formación de reglas difusas juega un papel vital. Hay cuatro estructuras del sistema de reglas de producción difusa (Weiss y Donnel, 1979) que son las siguientes:
- Un conjunto de reglas que representa las políticas y estrategias heurísticas del experto en la toma de decisiones.
- Un conjunto de datos de entrada que se evalúan inmediatamente antes de la decisión real.
- Un método para evaluar cualquier acción propuesta en términos de su conformidad con las reglas expresadas cuando hay datos disponibles.
- Un método para generar acciones prometedoras y determinar cuándo dejar de buscar mejores.
Todos los parámetros necesarios utilizados en el controlador de lógica difusa están definidos por funciones de pertenencia. Las reglas se evalúan utilizando técnicas como el razonamiento aproximado o el razonamiento interpolativo. Estas cuatro estructuras de reglas difusas ayudan a obtener la superficie de control que relaciona la acción de control con el estado medido o la variable de salida. A continuación, la superficie de control se puede muestrear hasta un número finito de puntos y, basándose en esta información, se puede construir una tabla de consulta. La tabla de consulta comprende la información sobre la superficie de control que se puede descargar en un chip de memoria de sólo lectura. Este chip constituiría un controlador fijo para la planta.
Arquitectura y Operaciones del Sistema FLC:
La arquitectura básica de un controlador de lógica difusa se muestra en la Figura 2. Los componentes principales de un sistema FLC son un fuzzificador, una base de reglas difusas, una base de conocimiento difusa, un motor de inferencia y un defuzzificador. También incluye parámetros para la normalización. Cuando la salida del desfuzzificador no es una acción de control para una planta, entonces el sistema es un sistema de decisión de lógica difusa. El fuzzificador presente convierte cantidades nítidas en cantidades borrosas. La base de reglas difusas almacena conocimiento sobre el funcionamiento del proceso de pericia en el dominio. La base de conocimiento difuso almacena el conocimiento sobre todas las relaciones difusas de entrada-salida. Incluye las funciones de pertenencia que definen las variables de entrada a la base de reglas difusas y las variables de salida a la planta bajo control. El motor de inferencia es el núcleo de un sistema FLC, y posee la capacidad de simular decisiones humanas realizando un razonamiento aproximado para lograr la estrategia de control deseada. El defuzzifier convierte las cantidades difusas en cantidades nítidas a partir de una acción de control difuso inferida por el motor de inferencia.
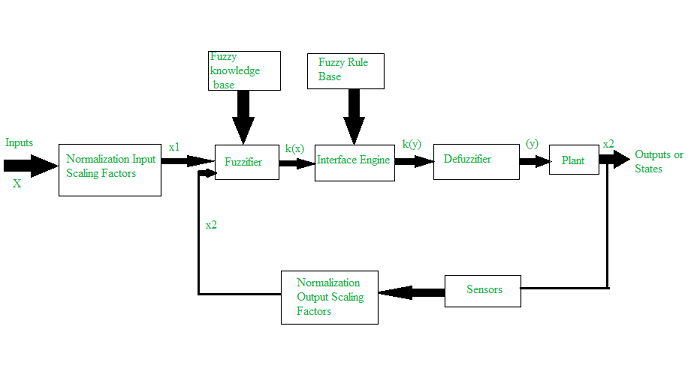
Fig. 2: Arquitectura básica de un sistema FLC
Los diversos pasos involucrados en el diseño de un controlador de lógica difusa son los siguientes:
- Paso 1: Ubique las variables de entrada, salida y estado del plano bajo consideración. yo
- Paso 2: dividir el universo completo del discurso abarcado por cada variable en una serie de subconjuntos borrosos, asignando a cada uno una etiqueta lingüística. Los subconjuntos incluyen todos los elementos del universo.
- Paso 3: Obtenga la función de pertenencia para cada subconjunto difuso.
- Paso 4: Asigne las relaciones difusas entre las entradas o estados de los subconjuntos difusos en un lado y la salida de los subconjuntos difusos en el otro lado, formando así la regla base.
- Paso 5: Elija los factores de escala apropiados para las variables de entrada y salida para normalizar las variables entre el intervalo [0, 1] y [-1, I].
- Paso 6: Llevar a cabo el proceso de fuzzificación.
- Paso 7: Identifique la salida aportada por cada regla utilizando un razonamiento aproximado difuso.
- Paso 8: combine las salidas difusas obtenidas de cada regla.
- Paso 9: finalmente, aplique la desfuzzificación para formar una salida nítida.
Los pasos anteriores se realizan y ejecutan para un sistema FLC simple. Los siguientes elementos de diseño se adoptan para diseñar un sistema FLC general:
- Estrategias de fuzzificación y la interpretación de un fuzzificador.
- Base de conocimiento difusa: Normalización de los parámetros involucrados; partición de espacios de entrada y salida; selección de funciones de pertenencia de un conjunto borroso primario.
- Base de reglas difusas: Selección de variables de entrada y salida; la fuente de la que se derivarán las reglas de control difuso; tipos de reglas de control difuso; Completitud de las reglas de control difuso.
- Lógica de la toma de decisiones: La definición adecuada de implicación difusa; interpretación del conectivo “y”; interpretación del conectivo “o”; máquina de inferencia.
- Materiales de defuzzificación e interpretación de un defuzzificador.
Aplicaciones:
Los sistemas FLC encuentran una amplia gama de aplicaciones en varios productos y sistemas industriales y comerciales. En varias aplicaciones, relacionadas con sistemas no lineales, variables en el tiempo, mal definidos y también sistemas complejos, los sistemas FLC han demostrado ser muy eficientes en comparación con otros sistemas de control convencionales. Las aplicaciones de los sistemas FLC incluyen:
- Control de trafico
- Máquina de vapor
- Control de vuelo de aeronaves
- control de misiles
- Control adaptativo
- Control de nivel de líquido
- modelo de helicóptero
- Controlador de velocidad del automóvil
- Controlador del sistema de frenado
- Control de procesos (incluye control de hornos de cemento)
- Control Robótico
- Control de ascensor (ascensor automático);
- Control de funcionamiento automático
- Control de plantas de enfriamiento
- Tratamiento de aguas
- Control de Calderas;
- Control de Reactores Nucleares;
- Control de Sistemas de Potencia;
- Control de aire acondicionado (controlador de temperatura)
- Procesos Biológicos
- Sistema Basado en el Conocimiento
- Unidad de control de detección de fallas
- Implementación de hardware difuso y computadoras difusas
Publicación traducida automáticamente
Artículo escrito por ankurbarick y traducido por Barcelona Geeks. The original can be accessed here. Licence: CCBY-SA